M5StackGray モータ駆動デモプログラム TC78H653FTG
2021.6.11 Coskx Lab
1 はじめに
M5StackGrayとモータドライバIC TC78H653FTGを使用し,モータ駆動デモプログラムを作成します。
TC78H653FTG 特徴
2つのモータを駆動できる。
1.8Vから7.5Vの低電圧電源でのモータ駆動ができる。
入力制御信号は2Vから5.5Vの広い範囲が使える。3.3V系マイコンではありがたい
通常は2つのモータを別々に駆動するためにHドライバを2回路別々に使用(Smallモデル)
Smallモデル駆動(通常駆動)では最大電流は2.5Aまで
大電流が必要な場合はHドライバ2つを結合して使用できる(Largeモデル)
Largeモデル駆動(2回路接続駆動)では最大電流は5Aまで
電流制限回路がついている(この回路が働くと機能が一次的に停止し,STBYをH→L→Hの操作をしないと復旧できない)
参考1 モータドライバIC TC78H653FTG(東芝デバイス&ストレージ)
データシート https://toshiba.semicon-storage.com/info/docget.jsp?did=63588&prodName=TC78H653FTG
アプリケーションノート https://toshiba.semicon-storage.com/info/docget.jsp?did=70283&prodName=TC78H653FTG
参考2 モータドライバIC TC78H653FTG 入出力ファンクション(Smallモデル)
LARGE = MODE = L, STBY = H(論理レベル) で使用する
モータは2つ接続できる。
モータ1について
| IN1 | IN2 | OUT1 | OUT2 | モード |
| L | L | OFF(Hi-Z) | OFF(Hi-Z) | ストップ |
| H | L | H | L | 正転 |
| L | H | L | H | 逆転 |
| H | H | L | L | ブレーキ |
モータ2について
| IN3 | IN4 | OUT3 | OUT4 | モード |
| L | L | OFF(Hi-Z) | OFF(Hi-Z) | ストップ |
| H | L | H | L | 正転 |
| L | H | L | H | 逆転 |
| H | H | L | L | ブレーキ |
参考3 モータドライバIC TC78H653FTG 入出力ファンクション(Largeモデル)
LARGE = H, MODE = L, STBY = H(論理レベル) で使用する
| IN1 | IN2 | OUT1(OUT2) | OUT3(OUT4) | モード |
| L | L | OFF(Hi-Z) | OFF(Hi-Z) | ストップ |
| H | L | H | L | 正転 |
| L | H | L | H | 逆転 |
| H | H | L | L | ブレーキ |
参考4 モータドライバIC TC78H653FTG 動作範囲(Smallモデル)
モータ出力電流は2つのモータそれぞれの値
| 項目 | 最小 | 標準 | 最大 |
| モータ電源電圧 | 1.8V | 3.0V | 7.5V |
| モータ出力電流 | ― | 2A | 2.5A |
| ロジックHレベル | 2.0V(Vm=5.0のとき) | ― | 5.5V |
| ロジックLレベル | -0.3V | ― | 0.5V |
| ロジック最大周波数 | ― | ― | 500kHz |
参考5 モータドライバIC TC78H653FTG 動作範囲(Largeモデル)
| 項目 | 最小 | 標準 | 最大 |
| モータ電源電圧 | 1.8V | 3.0V | 7.5V |
| モータ出力電流 | ― | 4A | 5A |
| ロジックHレベル | 2.0V(Vm=5.0のとき) | ― | 5.5V |
| ロジックLレベル | -0.3V | ― | 0.5V |
| ロジック最大周波数 | ― | ― | 500kHz |
参考6 モータドライバIC TC78H653FTG基板実装(秋月電子販売)
https://akizukidenshi.com/catalog/g/gK-14746/
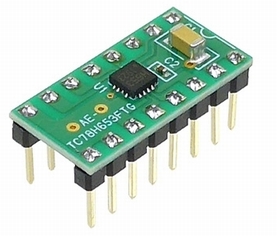
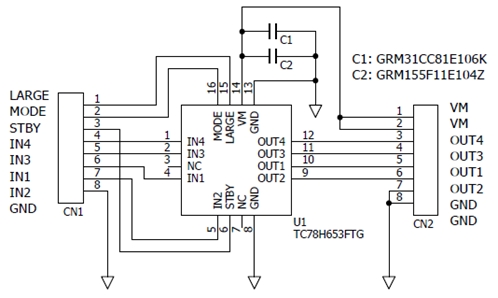
回路図でわかるように,秋月電子の基板上で,論理系のGNDとモータ駆動系のGNDが接続されています。
2 使用環境
- Windows 10 64-bit
- Arduino IDE 1.8.13
- M5Stack Gray ESP32-D0WDQ6-V3 (revision 3)
MPU6886 + BMM150 16MB 40MHz
- モータドライバIC TC78H653FTG
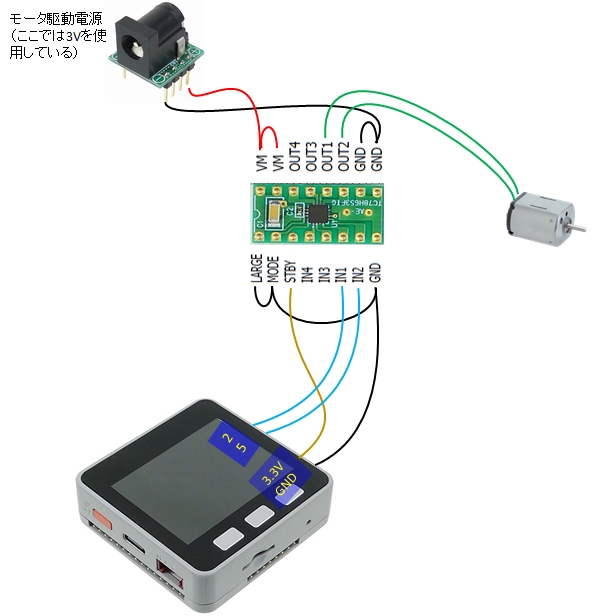
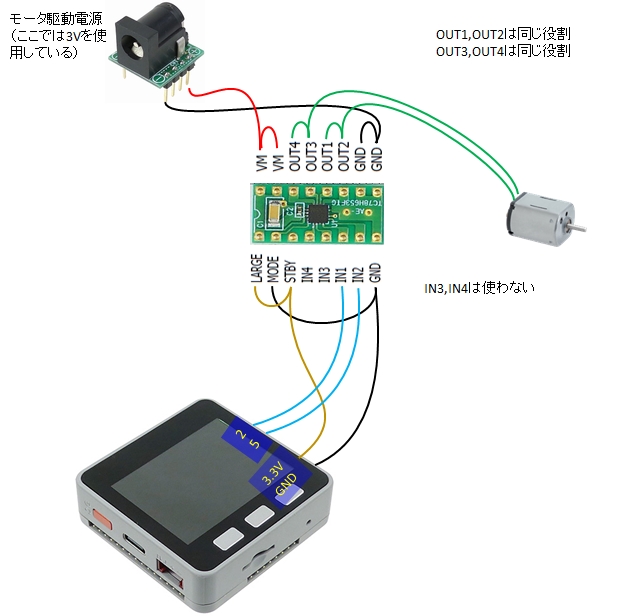
3 Smallモデルでの実験用配置と配線例
モータは1つだけ駆動します。配線は次のようになります。
M5Stackの正回転PWM信号の出力は「GPIO 2」です。
「GPIO 2」はM5Stackの裏側に 2 と書いてあるところです。これをTC78H653FTGのIN1に接続します。
M5Stackの逆回転PWM信号の出力は「GPIO 5」です。
「GPIO 5」はM5Stackの裏側に 5 と書いてあるところです。これをTC78H653FTGのIN2に接続します。
モータはTC78H653FTGのOUT1とOUT2に接続します。
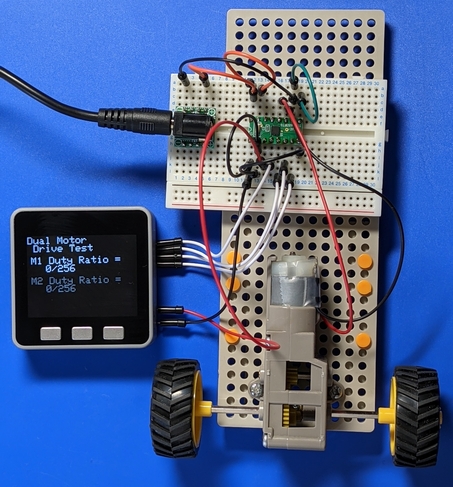
実験の様子
実験ではモータを1つだけ使用しています。
基板上で,論理系のGNDとモータ駆動系のGNDが接続されているため,論理系のGNDとモータ駆動系のGNDを接続することはしていません。
TC78H653FTGのSTBYには3.3V,GNDは共通のGNDにします。
参考 M5Stackの裏側に書いてあるピンの名称
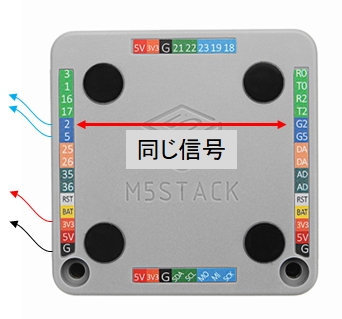
2,5を使用しています。
注意 ピンのいくつかは,他の用途に割り当てられている場合があるため,自由に変更できません。
4 Largeモデルでの実験用配置と配線例
配線は次のようになります。
M5Stackの正回転PWM信号の出力は「GPIO 2」です。
「GPIO 2」はM5Stackの裏側に 2 と書いてあるところです。これをTC78H653FTGのIN1に接続します。
M5Stackの逆回転PWM信号の出力は「GPIO 5」です。
「GPIO 5」はM5Stackの裏側に 5 と書いてあるところです。これをTC78H653FTGのIN2に接続します。
モータはTC78H653FTGのOUT1とOUT2に接続します。
ただし,OUT1とOUT2,OUT3とOUT4をそれぞれ接続します。
5 PWMの動作テスト用プログラム
Smallモデル配線でもLargeモデル配線でも,M5Stack側は「GPIO 2」と「GPIO 5」に出力するので,プログラムは同じものが使えます。
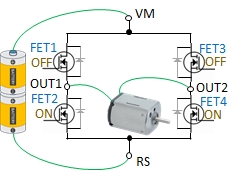
モータ駆動では,通電駆動状態とショートブレーキ状態を繰り返す駆動をしています。
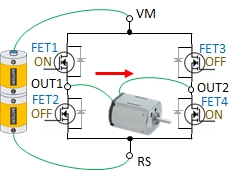
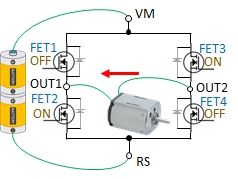
○ 正転動作(例 デューティ比25%)のときは →
1周期の75%区間で,モータドライバのIN2,IN1ともにHighを与え,残りの25%区間で,モータドライバのIN2にLowを与えとIN1にHighを与えます。(IN1はずっとHigh)
すなわち次の2つの状態が交互に生じます。(ショートブレーキ区間75%,正転通電駆動区間が25%)
○ 逆転動作(例 デューティ比25%)のときは →
1周期の75%区間で,モータドライバのIN1,IN2ともにHighを与え,残りの25%区間で,モータドライバのIN1にLow,IN2にHighを与えます。(IN2はずっとHigh)
すなわち次の2つの状態が交互に生じます。(ショートブレーキ区間75%,逆転通電駆動区間が25%)
2つのPWMモジュール(PWMチャンネル)をそれぞれ別のGPIOピンに出力します。
モータへの指令値は離散的で,プログラム内での見かけ上は
{-1.0, -0.75, -0.5, -0.25, 0., 0.25, 0.5, 0.75, 1.0}
を使用しています。正の値は正転,負の値は逆転になるようにしています。
モータ駆動関数driveMotor(int drivevalue)では,指令値の正負によって,PWM発生の仕方を変えています。
M5Stackプログラムでは,ボタンAで指令値を増加,ボタンBで指令値を減少させます。
設定値は次の通りです。
PWM生成に使用するビット数: 8bit
PWM周波数:20000Hz
使用するPWMモジュール(PWMチャンネル):2,3
(利用可能性を調べてある2,3,4,5,8,9,10,11,12,13,14,15の中から4つを選んでいます)
PWM出力に使用するGPIO PIN番号:2,5
(利用可能性を調べてある2,5,16,17,23,19の中から4つを選んでいます)
PWMの動作テスト用プログラム本体
モータ駆動メインプログラム MotorOOPTest01.ino
//MotorOOPTest01.ino//
#include <M5Stack.h>
#include "MotorDriver.h"
//DCブラシモータを1つ正転逆転駆動するテスト
//class MotorDriver 利用
//1つのモータを正逆駆動するためには,正転用と逆転用の2つのPWM信号が必要です。
//そのため,2つのPWMモジュール(PWMチャンネル)と2つのピンを割り当てます.
//正転(Forward) PWMチャンネル:2 GPIOピン:2
//逆転(Reverse) PWMチャンネル:3 GPIOピン:5
const uint8_t nBits_forPWM = 8; // PWMに使用するビット数 n=1~16[bit]
const double PWM_Frequency = 20000.0; // PWM周波数 Maxfreq=80000000.0/2^n[Hz]
const uint8_t PWM_F_CH = 2; // PWMチャンネル Forward
const uint8_t PWM_R_CH = 3; // PWMチャンネル Reverse
const uint8_t PWM_F_PIN = 2; // PWM出力に使用するGPIO PIN番号 Forward
const uint8_t PWM_R_PIN = 5; // PWM出力に使用するGPIO PIN番号 Reverse
const double Motor_Drive_dutyRatios[] = {-1.0, -0.75, -0.5, -0.25, 0., 0.25, 0.5, 0.75, 1.0};
const int nRatios = sizeof(Motor_Drive_dutyRatios)/sizeof(double);
//Motor_Drive_dutyRatios[]はモータ指令デューティー比の候補(-1.0 <= dutyRatio <= 1.0)
//モータ指令値:正の時は正転側のデューティ比,負のときは逆転側のデューティ比を表す
int dutyRatioIndex = nRatios>>1; //モータ指令値番号
double dutyRatio_Value = Motor_Drive_dutyRatios[dutyRatioIndex];
int value;
MotorDriver mMotorDriver; //class MotorDriver のインスタンス
void setup() {
M5.begin();
M5.Power.begin();
M5.Lcd.setTextSize(4);
M5.Lcd.print("Single Motor\n Drive Test");
mMotorDriver.setPins(PWM_F_PIN, PWM_R_PIN, PWM_F_CH, PWM_R_CH);
mMotorDriver.setPWM(nBits_forPWM, PWM_Frequency);
M5.Lcd.setCursor(10, 80);
M5.Lcd.printf("duty ratio =\n %.4f ",dutyRatio_Value);
value = mMotorDriver.driveMotor(dutyRatio_Value);
M5.Lcd.setCursor(10, 160);
M5.Lcd.printf("value =\n %5d ",value);
}
void loop() {
M5.update();
if (M5.BtnA.wasPressed()) {
dutyRatioIndex ++;
if (nRatios <= dutyRatioIndex) dutyRatioIndex--;
dutyRatio_Value = Motor_Drive_dutyRatios[dutyRatioIndex];
M5.Speaker.tone(880, 200); //Peett
M5.Lcd.setCursor(10, 80);
M5.Lcd.printf("duty ratio =\n %.4f ",dutyRatio_Value);
value = mMotorDriver.driveMotor(dutyRatio_Value);
M5.Lcd.setCursor(10, 160);
M5.Lcd.printf("value =\n %5d ",value);
}
if (M5.BtnB.wasPressed()) {
dutyRatioIndex --;
if (dutyRatioIndex < 0) dutyRatioIndex++;
dutyRatio_Value = Motor_Drive_dutyRatios[dutyRatioIndex];
M5.Speaker.tone(440, 200); //Peett
M5.Lcd.setCursor(10, 80);
M5.Lcd.printf("duty ratio =\n %.4f ",dutyRatio_Value);
value = mMotorDriver.driveMotor(dutyRatio_Value);
M5.Lcd.setCursor(10, 160);
M5.Lcd.printf("value =\n %5d ",value);
}
}
モータドライブクラスヘッダファイル MotorDriver.h
//MotorDriver.h//
#ifndef MotorDriver_h
#define MotorDriver_h
class MotorDriver {
public:
void setPins(int forwardPin, int reversePin, int forwardChannel, int reverseChannel);
void setPWM(int nBits_forPWM, double PWM_Frequency);
int driveMotor(double dutyRatio); // -1.0 <= dutyRatio <= 1.0
private:
int fwdPin, rvsPin;
int fwdChl, rvsChl;
int pwmMaxValue;
};
#endif
モータドライブクラス本体ファイル MotorDrive.cpp
//MotorDrive.cpp//
#include <Arduino.h>
#include "MotorDriver.h"
void MotorDriver::setPins(int forwardPin, int reversePin, int forwardChannel, int reverseChannel) {
fwdPin = forwardPin;
rvsPin = reversePin;
fwdChl = forwardChannel;
rvsChl = reverseChannel;
pinMode(fwdPin, OUTPUT); //出力したいピンを出力用途に設定
pinMode(rvsPin, OUTPUT); //出力したいピンを出力用途に設定
}
void MotorDriver::setPWM(int nBits_forPWM, double PWM_Frequency) {
pwmMaxValue = 1<<nBits_forPWM;
// 指定PWMチャンネルにPWM周波数と使用ビット数を設定
ledcSetup(fwdChl, PWM_Frequency, nBits_forPWM);
ledcSetup(rvsChl, PWM_Frequency, nBits_forPWM);
// 出力したいピンにPWMチャンネル出力をつなげる設定
ledcAttachPin(fwdPin, fwdChl);
ledcAttachPin(rvsPin, rvsChl);
}
//モータ指令値が正のときはモータは正転,負のときは逆転する
//モータ指令値の範囲は-1.0から1.0の間とする -1.0≦dutyratio≦1.0
//デバッグのためにdrivevalueを返す
int MotorDriver::driveMotor(double dutyratio) {
int drivevalue = (int)(pwmMaxValue * dutyratio);
if (drivevalue == 0) {
ledcWrite(PWM_M1_F_CH, 0);
ledcWrite(PWM_M1_R_CH, 0);
} else if (0<drivevalue) {
ledcWrite(PWM_M1_F_CH, pwmMaxValue);
ledcWrite(PWM_M1_R_CH, pwmMaxValue - drivevalue);
} else { //drivevalue<0
ledcWrite(PWM_M1_F_CH, pwmMaxValue + drivevalue);
ledcWrite(PWM_M1_R_CH, pwmMaxValue);
}
return drivevalue;
}
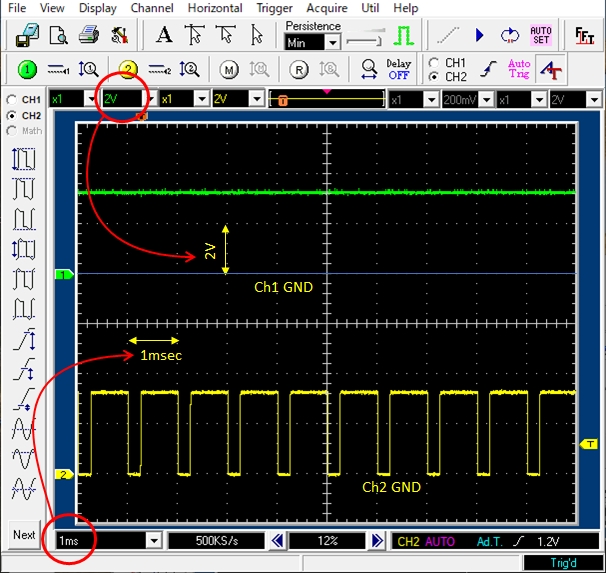
5 実行時の信号観察
PWM周波数を1000Hzにして実行時の GPIO 2 と GPIO 5 の信号をオシロスコープで観察しました。
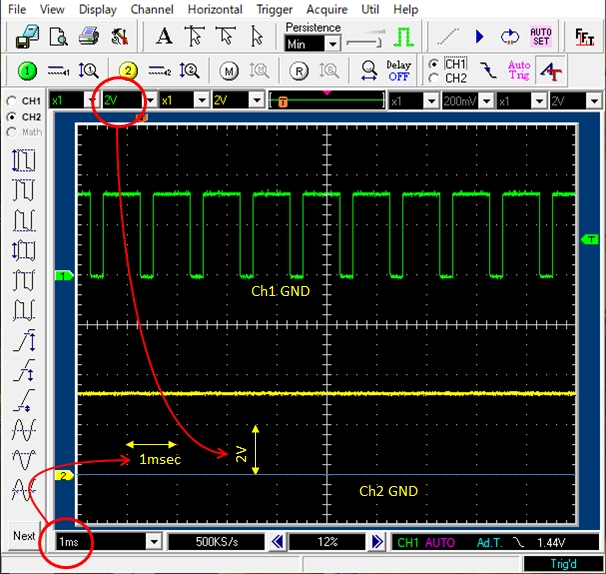
Ch1(緑)が GPIO 2 ,Ch2(黄)が GPIO 5 です。PWM指令値が正のとき,GPIO 5 にPWM波形が見え, GPIO 2 はHighが保たれています。PWM指令値が負のとき,GPIO 5 はHighが保たれ, GPIO 2 にPWM波形が見えています。
(1)PWM指令値 0.25 のとき,GPIO 2がHighでGPIO 5がLowになる区間が正転駆動区間です。デューティ比:25%が出力されています。
(2)PWM指令値 -0.25 のとき,GPIO 5がHighでGPIO 2がLowになる区間が逆転駆動区間です。デューティ比:25%が出力されています。
6 まとめ
M5StackGrayおよびモータドライバTC78H653FTGによるブラシDCモータ駆動テストを行ないました。
割り当て可能であるとわかっているGPIOピン2,5を使い,PWMチャンネルは2,3をそれぞれ割り当てました。
重要な問題
モータ用電源があらかじめ入っていると,M5Stackの電源が入り,起動してプログラムが起動するまでの間に,モータが回ってしまいます。
M5Stackの電源が入り,プログラムが起動するまでの間は,GPIOピンの状態は設定出来ず,GPIO 2はL,GPIO 5はHになっていることが原因です。
M5Stackの電源を先に入れて,起動してからモータ側の電源を入れるのが良いでしょう。他にも工夫があるかもしれません。
補足1 M5Stack Gray 出力ピン割り当てとPWMチャンネル選定テストの結果
1)M5Stack Grayで用途が制限されているGPIOピン
・回路図から読み取った,すでに使用されているGPIOピン
GPIO 1 3 ............. USB UART0 (RXD0,TXD0)で使用
GPIO 4 23 18 19 ...... SD SPIと共有
GPIO 33 27 23 18 14 .. LCDで使用
GPIO 21 22 ........... I2C,電源管理,モーションセンサ,磁気センサで使われている
GPIO 25 .............. Audioで使用
・ESP32仕様
GPIO 34~39は読み取り専用
2)M5Stack Grayで使えることを確認したGPIOピン
GPIO 2, GPIO 5 他とは共用していないので自由に使える
GPIO 16, GPIO 17 UART2 (TXD2・RXD2)を使わなければ OK
GPIO 26 DAを使わなければ OK
GPIO 19 SDを使わなければ OK
GPIO 35, GPIO 36 ADを使わなければ,入力のみOK
3)M5Stack Grayで使ってはいけない PWMチャンネル
0 音源として使われている (動作させるとビープ音がなる)
1 用途は不明だが,干渉され周期もデューティ比も指定とは異なる動作をする
6 LCDの輝度調整に使われている (動作させるとLCDの文字の明るさが変化する)
使用bit数が12以上のとき,この現象が現れる
7 LCDの輝度調整に使われている (動作させるとLCDの文字の明るさが変化する)
4)M5Stack Grayで使用確認できたPWMチャンネル
2,3,4,5,8,9,10,11,12,13,14,15