2022.12.15 Coskx Lab
1 PWM周期 4msec での電流観察
PWM周期を4msecとし,2つの駆動方式でモータを駆動し,デューティ比を変化させて,電流観察します。
pwm周期4msecは測定対象の電気的時定数に対して40倍の大きさです。
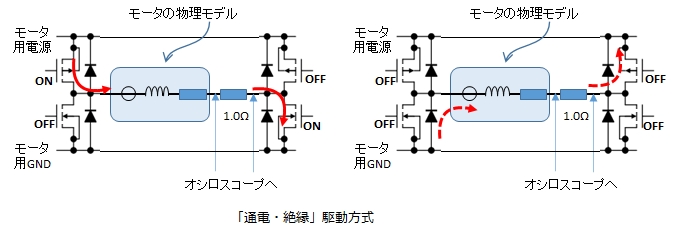
2 通電・絶縁駆動方式での電流観察
通電・絶縁駆動方式では,正転通電と絶縁をPWM周期で繰り返します。
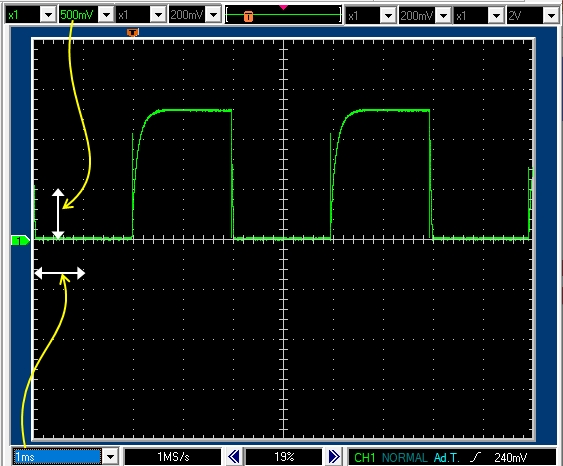
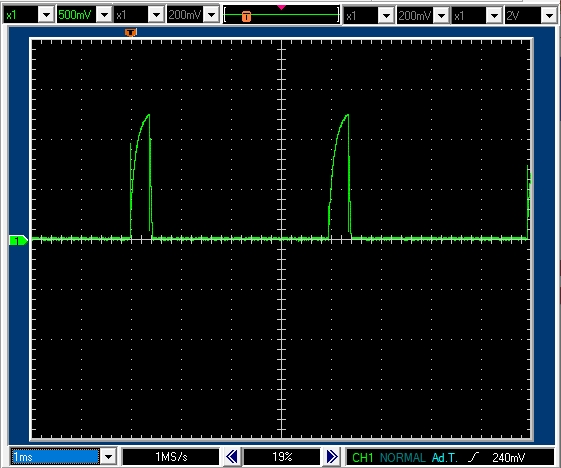
2.1 PWM周期 4msec デューティ比50% モータ軸を強制固定
モータ軸を強制固定しないと軸が回転し,逆起電力が発生します。出来るだけ純粋な状態を測定したいので,モータ軸を回転しないように強制固定しました。
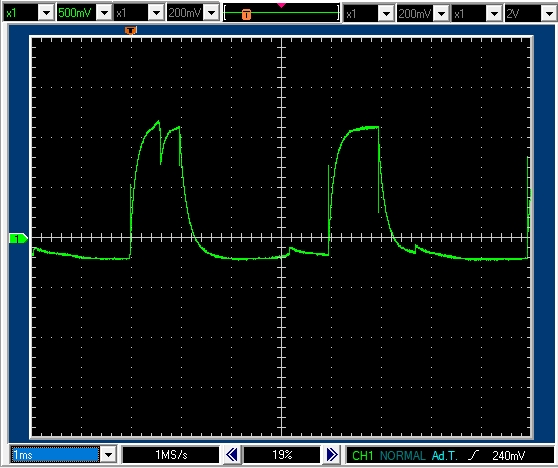
PWM周期4msecデューティ比50%で2msecのパルスがあります。パルス高は1.3Vなので正転駆動区間では1.3Aの電流が流れていることがわかります。
パルスの立ち上がりでは,インダクタンスの作用で,電流の立ち上がりがややなまっているのがわかります。
パルスの立下りでは,絶縁状態になるのでなまりはありません。
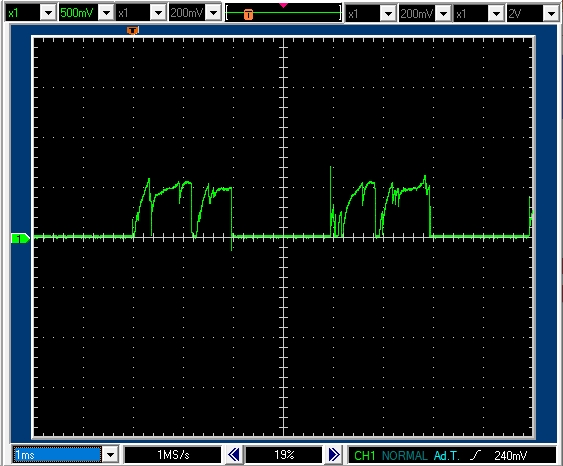
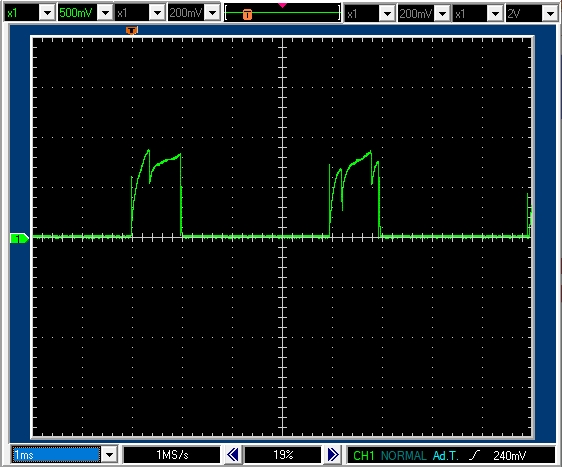
2.2 PWM周期 4msec デューティ比50% モータ軸は自由に回転
モータ軸が回転し,逆起電力が発生します。
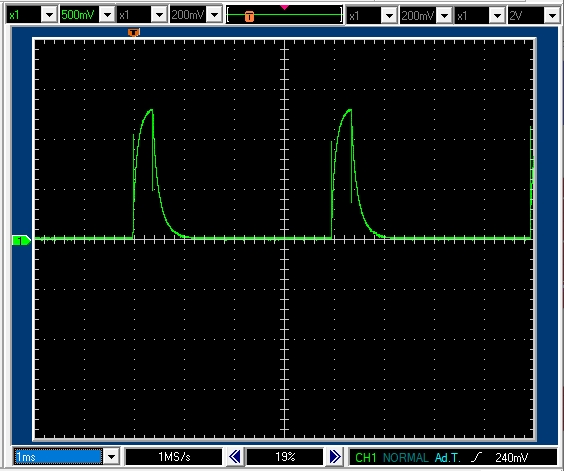
PWM周期4msecデューティ比50%で2msecのパルスがあります。パルス高は0.5Vなので正転駆動区間では0.5Aの電流が流れていることがわかります。
発生している逆起電力は強制固定時の1.3Vとの差である0.8V程度となります。
(逆起電力による発生電圧は回転数に比例します。)
停止(フリー)区間では,当然ですが電流はOFFになっています。
なお,パルスのギザギザは,DCモータ回転中のブラシの切替の影響と思われます。
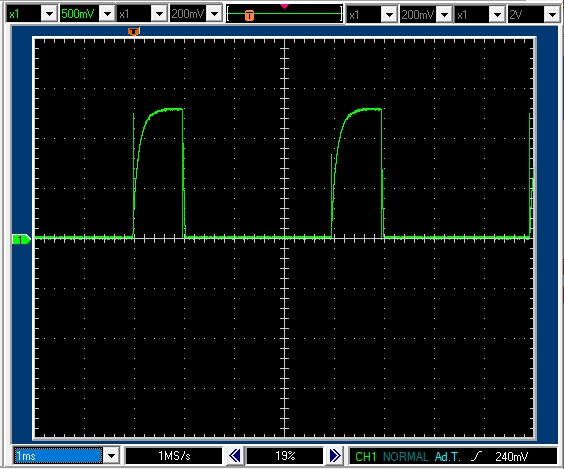
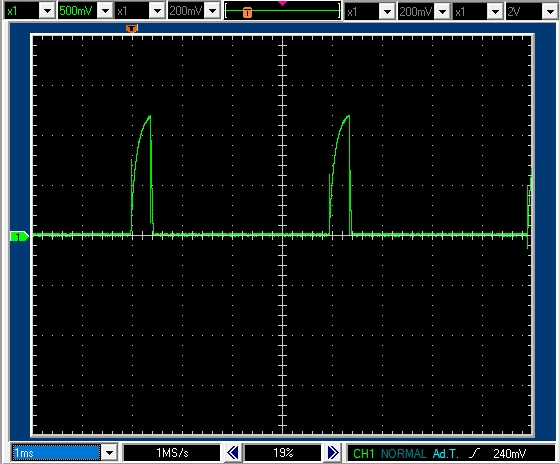
2.3 PWM周期 4msec デューティ比25% モータ軸を強制固定
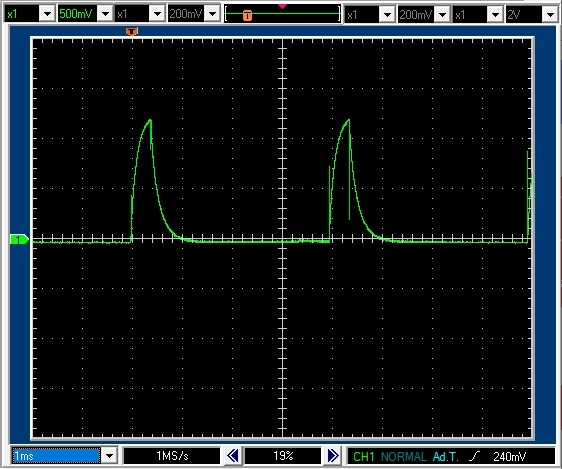
PWM周期4msecデューティ比25%で1msecのパルスがあります。パルス高は1.3Vなので正転駆動区間では1.3Aの電流が流れていることがわかります。
パルスの立ち上がりでは,インダクタンスの作用で,電流の立ち上がりがややなまっているのがわかります。
2.4 PWM周期 4msec デューティ比25% モータ軸は自由に回転
モータ軸が回転し,逆起電力が発生します。
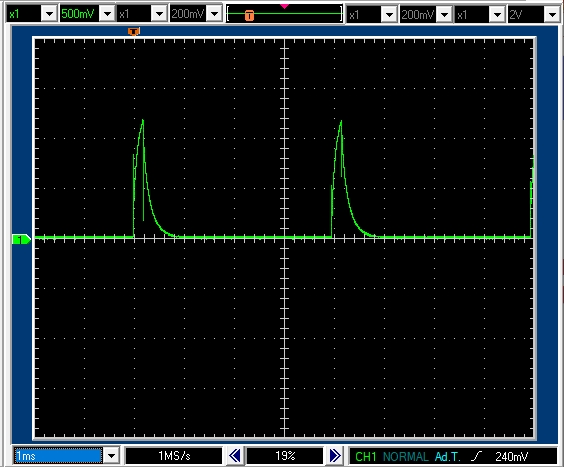
PWM周期4msecデューティ比25%で1msecのパルスがあります。パルス高は0.7Vなので正転駆動区間では0.7Aの電流が流れていることがわかります。
発生している逆起電力は強制固定時の1.3Vとの差である0.6V程度となります。
停止(フリー)区間では,当然ですが電流はOFFになっています。
なお,パルスの乱れは,DCモータ回転中のブラシの切替の影響と思われます。
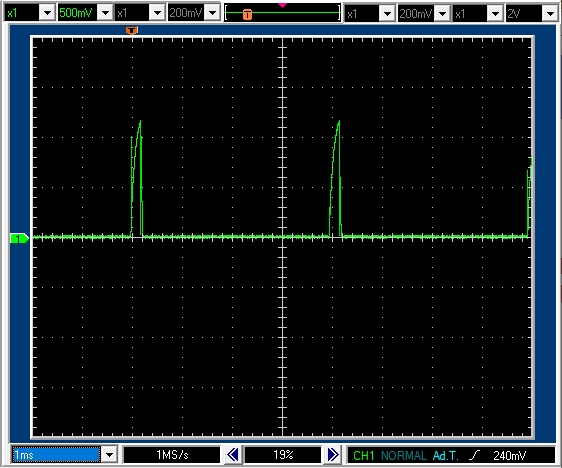
2.5 PWM周期 4msec デューティ比10% モータ軸を強制固定
PWM周期4msecデューティ比10%で0.4msecのパルスがあります。
パルスの立ち上がりでは,インダクタンスの作用で,電流の立ち上がりがなまっていて,しかも最大値に達していません。
2.6 PWM周期 4msec デューティ比10% モータ軸は自由に回転(ゆっくり回転)
モータ軸は固定していませんが,回転を始めることができない状態です。
PWM周期4msecデューティ比10%で0.4msecのパルスがあります。
パルス高は強制固定時に比べて少し下がっています。
2.7 PWM周期 4msec デューティ比5% モータ軸は非固定ですが回転できず
モータ軸は固定していませんが,回転を始めることができない状態です。
PWM周期4msecデューティ比5%で0.2msecのパルスがあります。
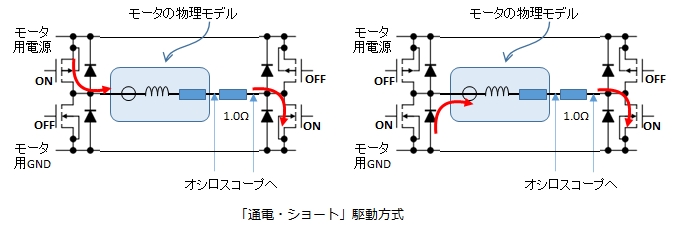
3 通電・ショート駆動方式での電流観察
通電・ショート駆動方式では,正転通電とショートをPWM周期で繰り返します。
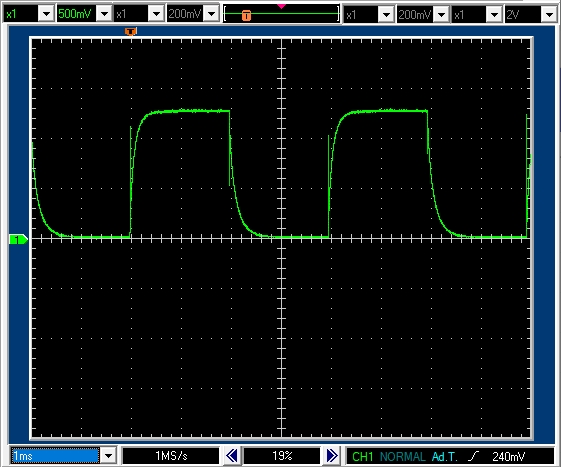
3.1 PWM周期 4msec デューティ比50% モータ軸を強制固定
PWM周期4msecデューティ比50%で2msecのパルスがあります。パルス高は1.3Vなので正転駆動区間では1.3Aの電流が流れていることがわかります。
パルスの立ち上がりおよび立ち下りでは,インダクタンスの作用で,電流の立ち上がりおよび立ち下りがややなまっているのがわかります。
2.1と比較すると,こちらは立下りのなまりがあります。これはGNDを経由して電流がしばらくの間流れ残っている状態です。
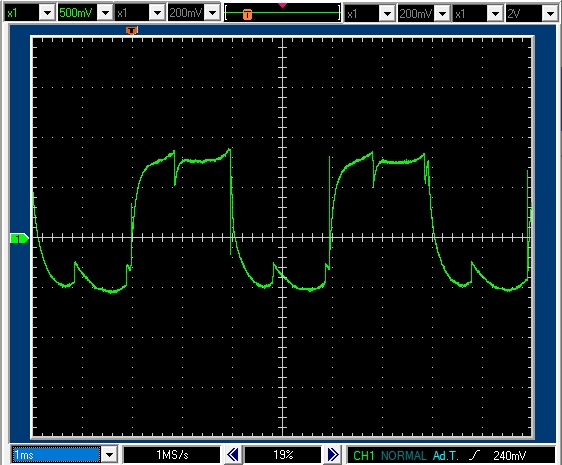
3.2 PWM周期 4msec デューティ比50% モータ軸は自由に回転
モータ軸が回転し,逆起電力が発生します。
PWM周期4msecデューティ比50%で2msecのパルスがあります。
パルス高は0.7Vなので正転駆動区間では0.7Aの電流が流れていることがわかります。
発生している逆起電力は強制固定時の1.3Vとの差である0.6V程度となります。
停止(ショートブレーキ)区間では-0.4Vなので,逆向きに0.4Aの電流が流れています。
この電流はGND経由で1周していて,抵抗で熱になります。
軸は回転しているので,逆起電力は常に0.6Vが発生していることになります。
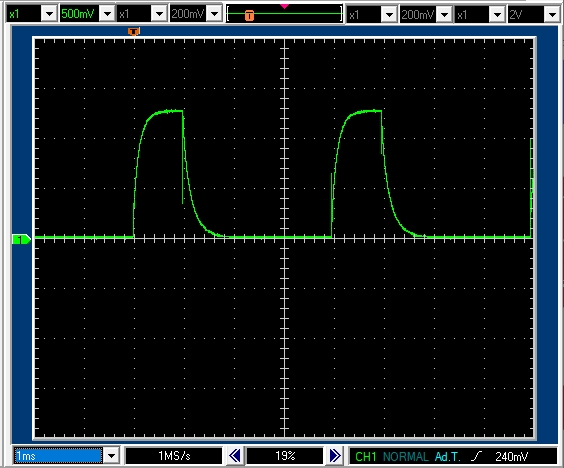
3.3 PWM周期 4msec デューティ比25% モータ軸を強制固定
PWM周期4msecデューティ比25%で1msecのパルスがあります。パルス高は1.3Vなので正転駆動区間では1.3Aの電流が流れていることがわかります。
パルスの立ち上がりおよび立ち下りでは,インダクタンスの作用で,電流の立ち上がりおよび立ち下りがややなまっているのがわかります。
3.4 PWM周期 4msec デューティ比25% モータ軸は自由に回転
モータ軸が回転し,逆起電力が発生します。
PWM周期4msecデューティ比25%で1msecのパルスがあります。
パルス高は1.1Vなので正転駆動区間では1.1Aの電流が流れていることがわかります。
発生している逆起電力は強制固定時の1.3Vとの差である0.2V程度となります。
停止(ショートブレーキ)区間では-0.2Vなので,逆向きに0.2Aの電流が流れています。
3.5 PWM周期 4msec デューティ比10% モータ軸を強制固定
PWM周期4msecデューティ比10%で0.4msecのパルスがあります。
3.6 PWM周期 4msec デューティ比10% モータ軸は自由に回転(ゆっくり回転)
モータ軸が回転し,逆起電力が発生します。
PWM周期4msecデューティ比10%で0.4msecのパルスがあります。
ゆっくり回転しているので逆起電力が小さく「3.5」とほとんど同じ波形になっています。
3.7 PWM周期 4msec デューティ比5% モータ軸は非固定ですが回転できず
モータ軸は固定していませんが,回転を始めることができない状態です。
PWM周期4msecデューティ比5%で0.2msecのパルスがあります。
4 まとめ
2つのPWM駆動方式でDCモータを駆動したときの,モータを流れる電流の様子を観察しました。
PWM周期は4msecを使用しています。
このPWM周期は,ここで測定しているDCモータ回路の時定数 \(T = 100 \mu sec\) に対して\(40T\) になります。