2022.12.15 Coskx Lab
1 PWM周期 0.4msec での電流観察
PWM周期を0.4msecとし,2つの駆動方式でモータを駆動し,デューティ比を変化させて,電流観察します。
pwm周期0.4msecは測定対象の電気的時定数に対して4倍の大きさです。
通常はこれくらいが良いとされています。
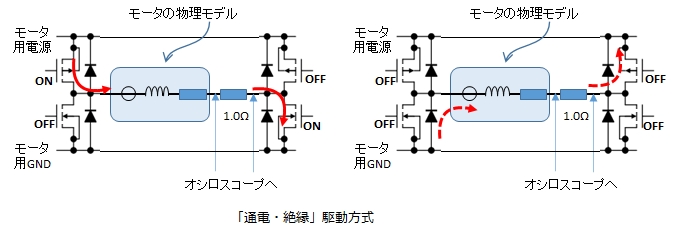
2 通電・絶縁駆動方式での電流観察
通電・絶縁駆動方式では,正転通電と絶縁をPWM周期で繰り返します。
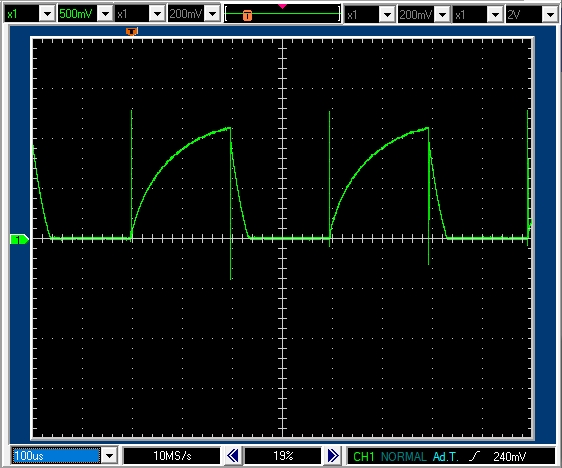
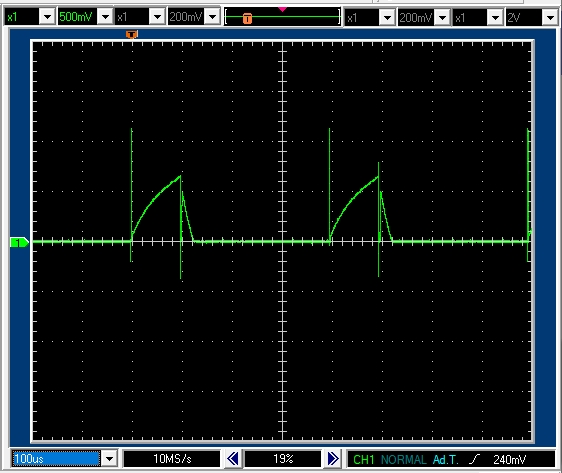
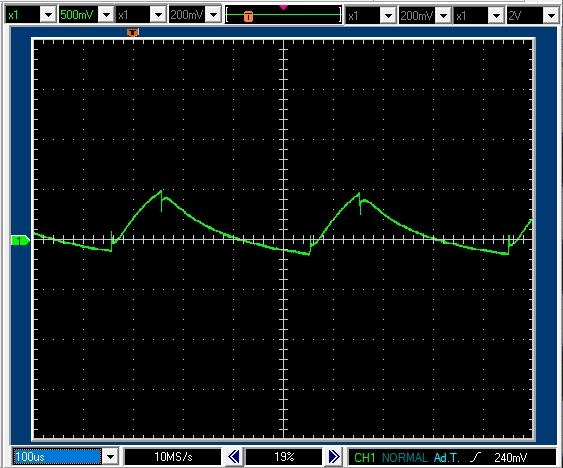
2.1 PWM周期 0.4msec デューティ比50% モータ軸を強制固定
モータ軸を強制固定しないと軸が回転し,逆起電力が発生します。出来るだけ純粋な状態を測定したいので,モータ軸を回転しないように強制固定しました。
PWM周期0.4msecデューティ比50%で0.2msecのパルスがあります。
パルスの立ち上がりの最大値になる前に,急速に立ち下がっています。
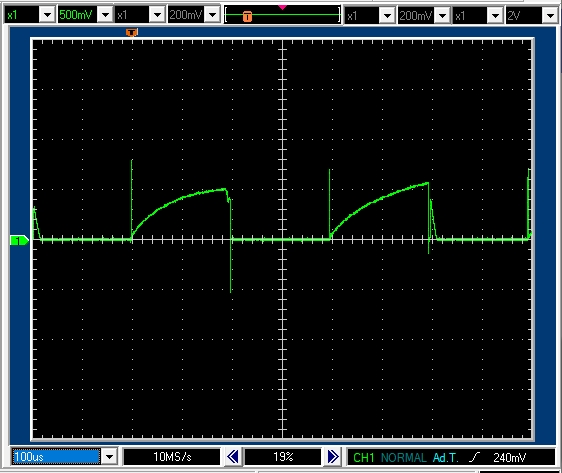
2.2 PWM周期 0.4msec デューティ比50% モータ軸は自由に回転
モータ軸が回転し,逆起電力が発生します。
PWM周期0.4msecデューティ比50%で0.2msecのパルスがあります。
逆起電力の影響でパルスのピークが強制固定時よりも低くなっているのがわかります。
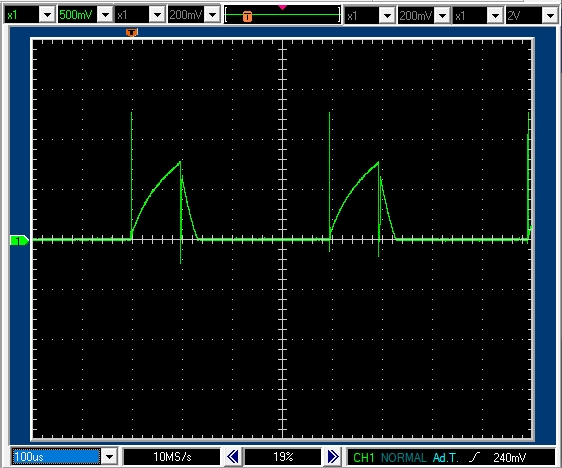
2.3 PWM周期 0.4msec デューティ比25% モータ軸を強制固定
PWM周期0.4msecデューティ比25%で0.1msecのパルスがあります。
パルスの立ち上がりの最大値になる前に,急速に立ち下がっています。
2.4 PWM周期 0.4msec デューティ比25% モータ軸は自由に回転 (手で手伝ってようやく回転)
PWM周期0.4msecデューティ比25%で0.1msecのパルスがあります。
逆起電力が小さいので「2.3」と波形がほとんど同じです。
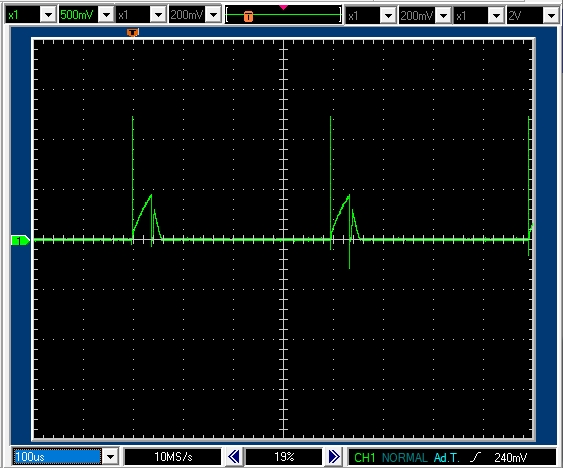
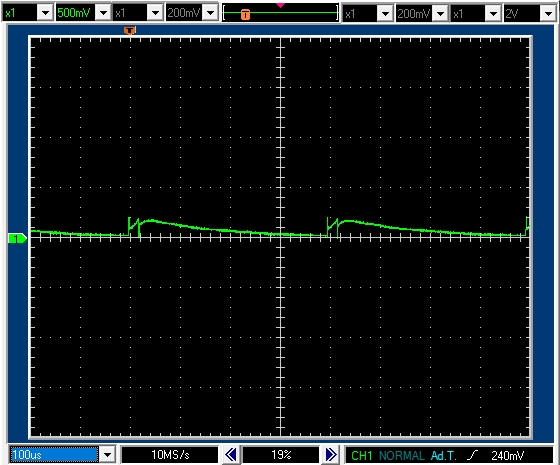
2.5 PWM周期 0.4msec デューティ比10% モータ軸は非固定ですが回転できず
モータ軸は固定していませんが,回転を始めることができない状態です。
PWM周期0.4msecデューティ比10%で0.04msecのパルスがあります。
パルスのピークは立ち上がりきる前に立ち下がってしまっています。
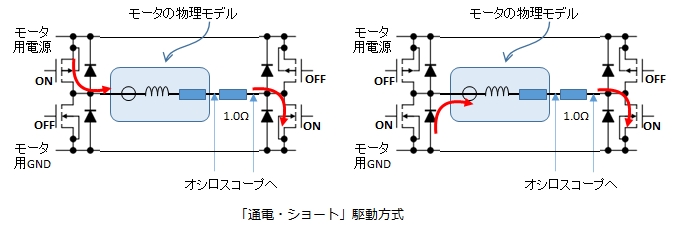
3 通電・ショート駆動方式での電流観察
通電・ショート駆動方式では,正転通電とショートをPWM周期で繰り返します。
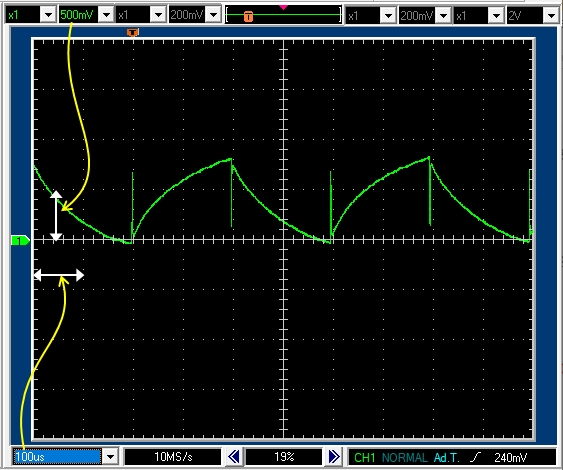
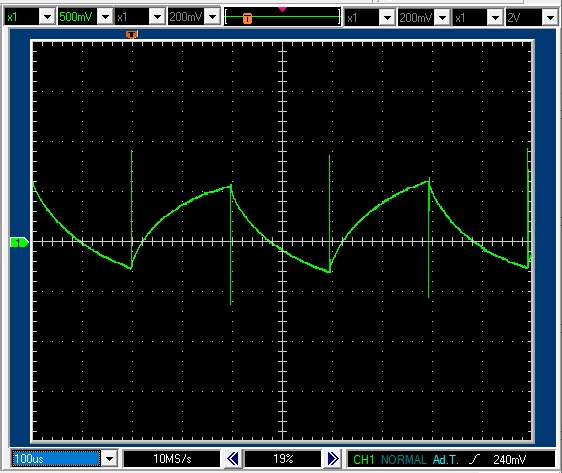
3.1 PWM周期 0.4msec デューティ比50% モータ軸を強制固定
PWM周期0.4msecデューティ比50%で0.2msecのパルスがあります。
パルス高は立ち上がり切る前に立ち下がってしまい,0Vまで落て再び立ち上がっています。
パルスの最大高さは0.8Vです。
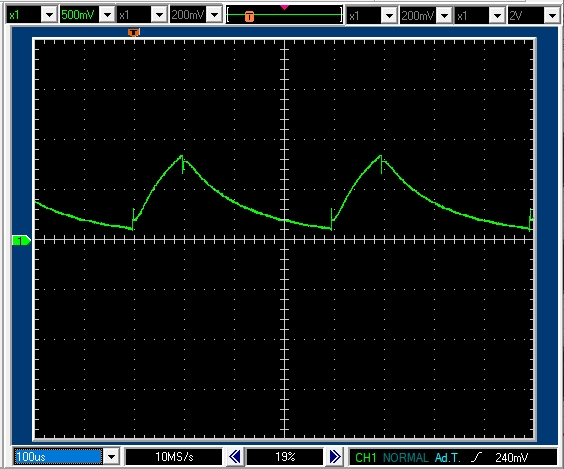
3.2 PWM周期 0.4msec デューティ比50% モータ軸は自由に回転
モータ軸が回転し,逆起電力が発生します。
PWM周期0.4msecデューティ比50%で0.2msecのパルスがあります。
逆起電力の影響で,「3.1」の波形を0.6V下げた波形になっています。
(0.6Vの逆起電力が発生している。)
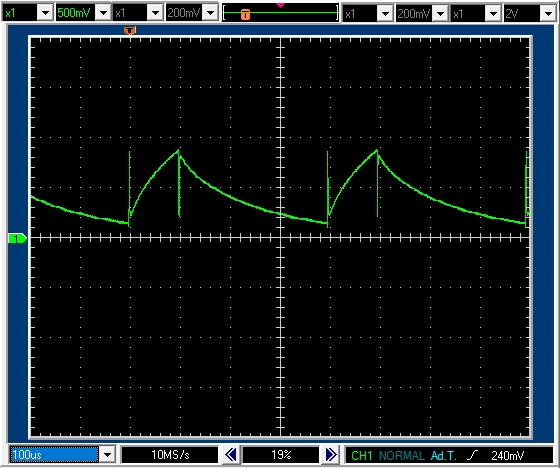
3.3 PWM周期 0.4msec デューティ比25% モータ軸を強制固定
PWM周期0.4msecデューティ比25%で0.25msecのパルスがあります。
パルス高は立ち上がりきる前に立ち下がってしまい,0Vまで落ちる前に再び立ち上がっています。
パルスの最大高さは0.9Vです。
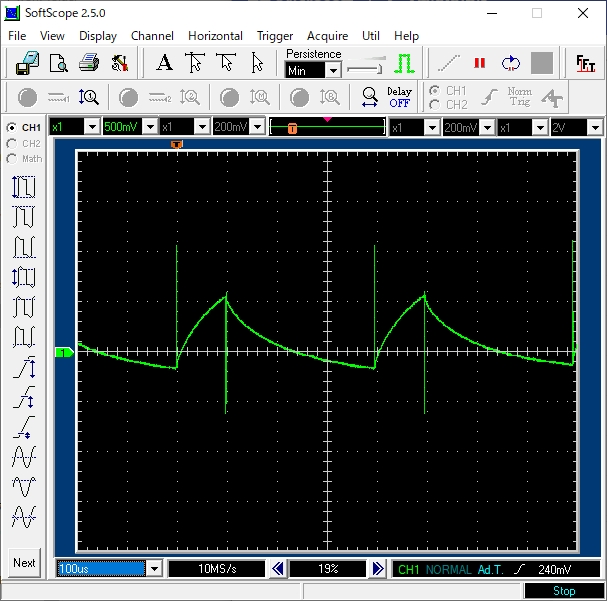
3.4 PWM周期 0.4msec デューティ比25% モータ軸は自由に回転
モータ軸が回転し,逆起電力が発生します。
PWM周期0.4msecデューティ比25%で0.1msecのパルスがあります。
逆起電力の影響で,「3.3」の波形を0.2V下げた波形になっています。
(0.2Vの逆起電力が発生している。)
3.5 PWM周期 0.4msec デューティ比10% モータ軸を強制固定
PWM周期0.4msecデューティ比10%で0.04msecのパルスがあります。
パルス高は立ち上がりきる前に立ち下がってしまい,0Vまで落ちる前に再び立ち上がっています。
パルスの最大高さは0.8Vです。
3.6 PWM周期 0.4msec デューティ比10% モータ軸は自由に回転
モータ軸が回転し,逆起電力が発生します。
PWM周期0.4msecデューティ比10%で0.04msecのパルスがあります。
逆起電力の影響で,「3.5」の波形を0.2V下げた波形になっています。
(0.2Vの逆起電力が発生している。)
3.7 PWM周期 0.4msec デューティ比5% モータ軸は非固定ですが回転できず
モータ軸は固定していませんが,回転を始めることができない状態です。
PWM周期0.4msecデューティ比5%で0.02msecのパルスがあります。
4 まとめ
2つのPWM駆動方式でDCモータを駆動したときの,モータを流れる電流の様子を観察しました。
PWM周期は0.4msecを使用しています。
このPWM周期は,ここで測定しているDCモータ回路の時定数 \(T = 100 \mu sec\) に対して\(4T\) になります。
通電・絶縁駆動方式での駆動において低デューティ比では平均電流が少なくなって,発生トルクが小さく,回転が始められない現象が顕著になりました。(10%で起動できない 25%でも起動に苦労する)