モータドライバボード(KITRONIK-5620/5698)の外部電源は4.5Vです。
ここでは拡張機能Kitronik-Motor-Driverを使用しますが,子供向け仕様のため,使用方法が限定されています。
符号付きの指令値を使用するときや,ショートブレーキを使いたいときには こちらを参照してください。
2021.7.26 Coskx Lab
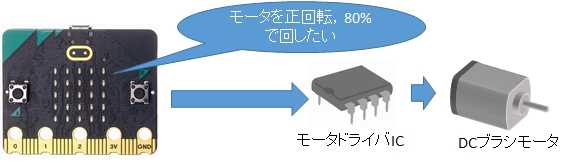
1 はじめに
micro:bitにモータドライバボード(KITRONIK-5620)または(KITRONIK-5698)を接続し,モータを回転させます。
モータドライバボード(KITRONIK-5620/5698)の外部電源は4.5Vです。
ここでは拡張機能Kitronik-Motor-Driverを使用しますが,子供向け仕様のため,使用方法が限定されています。
符号付きの指令値を使用するときや,ショートブレーキを使いたいときには
こちらを参照してください。
2 使用環境
3 端子の割り付け
モータドライバボード(KITRONIK-5620)または(KITRONIK-5698)を使用しますが,これらはすでにP8,P12,P0,P16を使用することになっているので,新たな端子を割りつける必要はありません。しかし,他の端子を使用するセンサなどを同時に使用するときにはすでにこれらの端子が使用済であることに気を付ける必要があります。(二重割り当てしないようにします)
補足
micro:bitのP8,P12はモータドライバボード内で,モータ1の制御に用いられ,モータ1ドライバ回路のIN1,IN2に接続されています。
micro:bitのP0,P16はモータドライバボード内で,モータ2の制御に用いられ,モータ2ドライバ回路のIN1,IN2に接続されています。
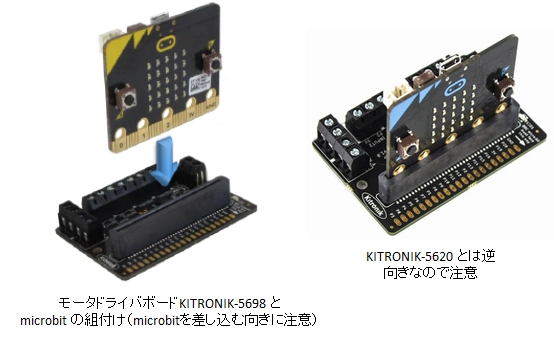
4 接続
micro:bitをモータドライバボード(KITRONIK-5620)または(KITRONIK-5698)に取り付け,モータを接続します。
信号線はモータドライバボード内で接続済なので,新たな配線は不要です。
KITRONIK-5620の電源として4.5V~6Vを与えるとボード内で,3.3Vロジック回路用電源を供給することができ,micro:bitに供給するため,この電源だけでシステムが動作可能です。
KITRONIK-5698では電源としてて3V~10Vを与えるとボード内で,3.3Vロジック回路用電源を供給することができ,micro:bitに供給するため,この電源だけでシステムが動作可能です。(3.3Vでセンサ等を駆動する場合は電源は4V~10Vが必要)
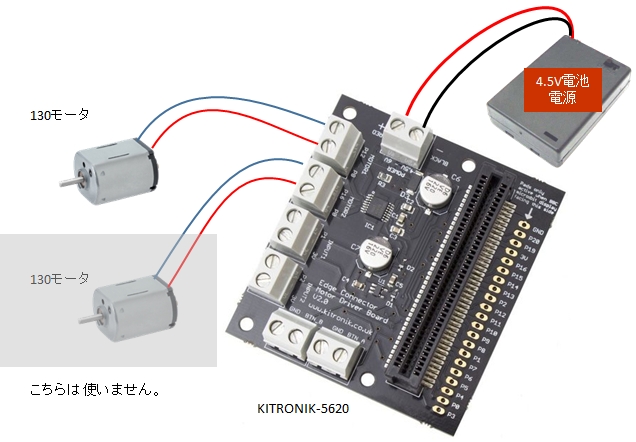
(1) KITRONIK-5620を使用する場合

図のように2つのモータを駆動できますが,ここではテストなので1つだけモータを回します。
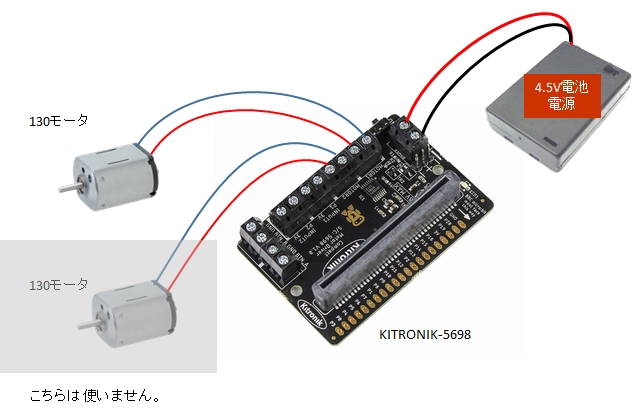
(2) KITRONIK-5698を使用する場合
図のように2つのモータを駆動できますが,ここではテストなので1つだけモータを回します。
注意 モータは,電磁ノイズを発生するため,モータへのノイズ対策をしておかないと,他のセンサなどが誤動作することがあります。
→ モータへのノイズ対策
5 テストプログラム
KITRONIKモータドライバ用拡張機能を用いて,MakeCodeブロックプログラムでプログラミングします。
KITRONIK-5620とKITRONIK-5698は同じプログラムで動作させることができます。
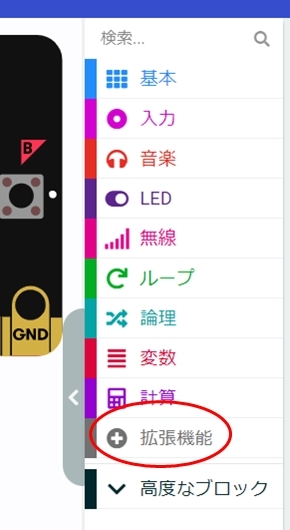
MakeCode画面で「拡張機能」を開くと,拡張機能の一覧にKitronik-Motor-Driverがありますので,これを組み込みます。(一覧にない場合は,「Kitronik-Motor-Driver」を検索すると出てきます。)

使える拡張機能が取得出来たら,あとは,組み立てるだけです。
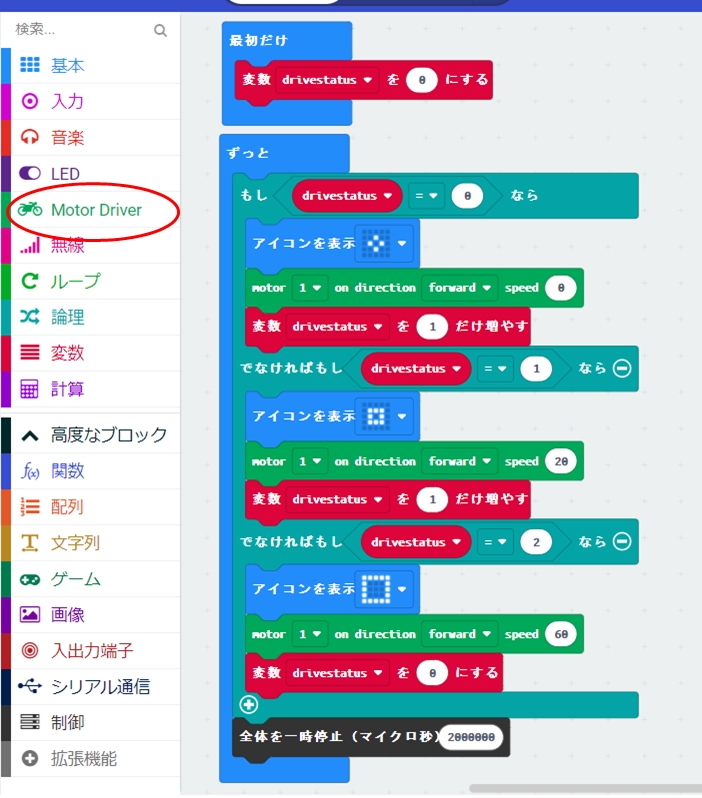
テストプログラムではモータ1だけを駆動しています。2秒ごとにモータ指令値を変えてモータ1を回転させます。
モータへの指令値(speedと書いてあります。指令値範囲:0~100)は0,20,60を使います。大きな値ほどモータが力強く回転します。
モータ指令値が変わるごとにLED表示も変化させて,現在の指令値(0,小,大)がわかるようにしています。
モータ指令値を指令するところで,on direction 「forward」を「reverse」に変えるとモータが逆転します。
モータ2に関する指示は,「motor1」のところを「motor2」に変更すれば出来ます。
「motor1」「motor2」の両方を指示すれば2つのモータを同時に駆動できます。
KITRONIKモータドライバの動作テスト用プログラム
コピペする場合は,拡張機能の一覧からにKitronik-Motor-Driverを取り込んでから,次のソースコードをPythonソースとして貼り付ければ完了です。
低デューティ比での駆動の弱点
モータドライバを使って,PWM方式でDCモータを駆動するとき,低デューティ比で,電流が小さくなり,電流に比例してモータの発生トルクも小さくなり,静止状態からモータを起動できない場合があります。
次のような対策が考えられます。
・モータ電源電圧を高くする
・モータ指令値を高めにシフトする
6 まとめ
KITRONIK-5620またはKITRONIK-5698を使用し,モータの指令値に合わせて,モータの回転の力強さが変化するのを確かめられました。
補足1 モータ駆動の緑色のブロックの動作
MakeCodeブロックプログラムにおけるモータ駆動の緑色のブロックの動作の舞台裏を考えます。
motor on direction speed
を例に取ります。
この命令は,モータ1をforward(正転)させなさいの意味です。
micro:bitのP8とP12がモータ1の制御に使われています。
「speed」という表現はduty cycle(duty ratio)のことで,micro:bitが作り出すPWM(pulse width moduration:パルス幅変調)信号の時間的変化を指示しています。
PWM信号はデジタル信号なので,0または1の値を取ります。micro:bitの端子に見えるのは電気信号ですので,0Vまたは3.3Vの値をとります。
PWM信号は周期的に0,1を繰り返す信号になります。繰り返し1回分の時間を周期(ここではPWM周期)と言います。周期の逆数は周波数です。
この拡張機能では周波数(ここではPWM周波数)は決められていて,50Hz(周期は20msec)でした。
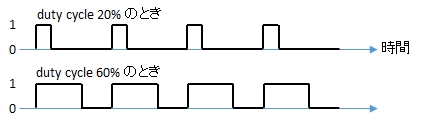
speed 20 はduty cycle 20%の意味です。
これは,周期的信号の1の部分の長さを1周期の20%にするという意味です。
PWM信号はモータドライバでモータの駆動などに使われます。信号が1(High, 3.3V)の区間はモータに通電し,信号が0(Low, 0V)の区間はモータに通電しないというようにモータドライバは動作します。
この動作が1秒間に50回なので,モータは小刻みに動いたり止まったりするはずですが,モータの回転軸には慣性があるので,小刻みな動作にはなりません。
そして,duty cycle 20%のときよりduty cycle 60%のときの方がモータは力強く回ります。
(発生トルクが大きくなりますが,残念ながら比例はしません。)
duty cycle 0%のときは通電無しになり,duty cycle 100%のときには連続通電となります。
補足2 PWM信号の観察
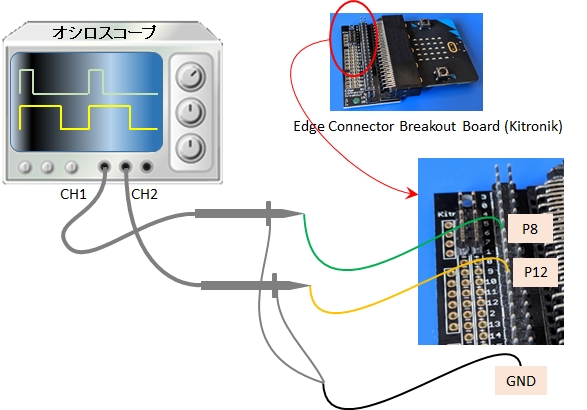
micro:bitのP8とP12の信号をオシロスコープで観察します。
モータドライバボードにmicro:bitが挿入された状態では,micro:bitのP8とP12の信号を取り出して見ることができません。
そこで,micro:bit内のプログラムをそのままにして,次のようにブレイクアウトボードに差し替えて,信号観察を行います。
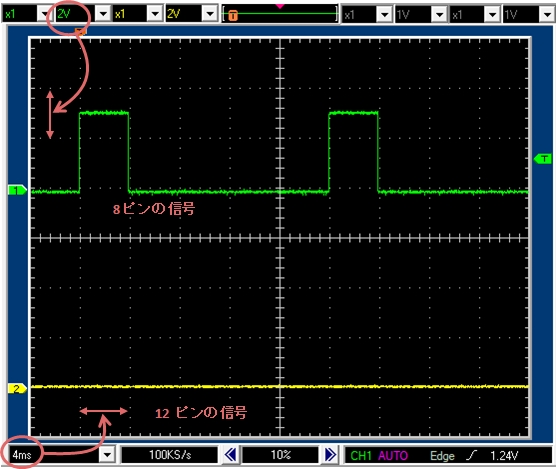
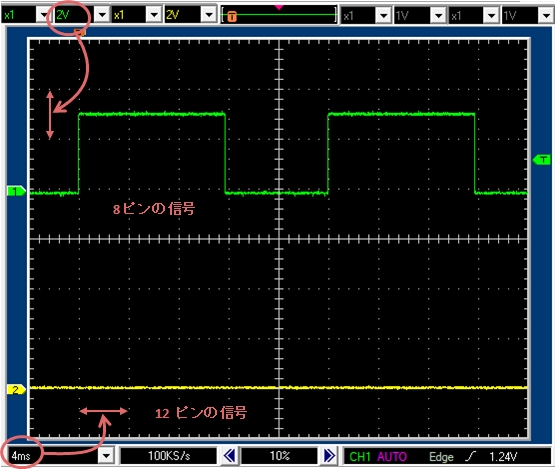
duty cycle 20%のときとduty cycle 60%のときのP8とP12の信号の観察は次のようになりました。
(P8のみにPWM信号が現れています。周期は20msecでduty cycleの違いがわかると思います。)
(1) duty cycle 20%のとき
(2) duty cycle 60%のとき
補足3 モータ正逆転の仕組み
on direction 「forward」のときは,P8(モータドライバIN1)のみにPWM信号が現れました。「reverse」のときはP12(モータドライバIN2)のみにPWM信号が現れます。
これでどうしてモータの正逆転ができるのか考えてみます。
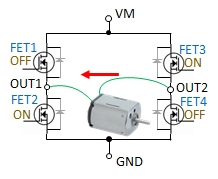
次の図はモータドライバの中味の重要な部分だけを取り出したものです。
FETは単純にスイッチのように働きます。ただし,FETは上向きダイオードがあり(寄生している)図の上向きには電流はいつでも流れる性質があります。
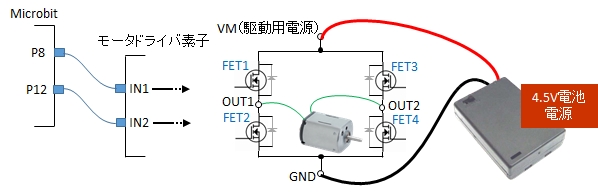
P8(モータドライバIN1)信号とP12(モータドライバIN2)信号の組み合わせは4通りあるのですが,4つのFETがどのように働くのかを次に示します。
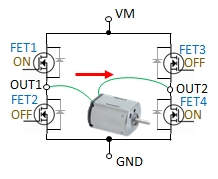
A. P8(モータドライバIN1):1 P12(モータドライバIN2):0 のとき
FET1とFET4がONになり,正転方向に電流が流れます。
B. P8(モータドライバIN1):0 P12(モータドライバIN2):1 のとき
FET3とFET2がONになり,逆転方向に電流が流れます。
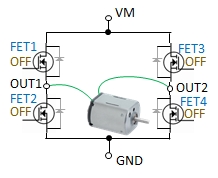
C. P8(モータドライバIN1):0 P12(モータドライバIN2):0 のとき
4つのFETはすべてOFFになり,モータは静止するか,惰性回転しています。
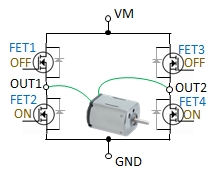
D. P8(モータドライバIN1):1 P12(モータドライバIN2):1 のとき
FET2とFET4がONになります。FETは上向きには電流はいつでも流れる性質があるので,モータはショートブレーキ状態です。
しかし,拡張機能Kitronik-Motor-Driverでは,この状態を指令することはできません。
実際にはPWM駆動されているので forward で duty cycle が20%のときは,状態Aを4msec,状態Cを16msecという動作を連続しています。
モータ2に関しても,P0とP16で同様な操作がなされています。
補足4 PWM周期より短い周期でのデューティ値変更
モータドライバ拡張機能の舞台裏では,デフォルトで20ミリ秒周期のPWM信号が生成されています。プログラムではPWMデューティ比を決めるデューティ値(0から1023までの値)を設定します。(例えばモータドライバ指令ブロックで指令値50を与えるとデューティ値512が設定されます。)
PWM信号生成のメカニズムは次のようになっています。
1周期の間にPWMカウンタが0から1023までを数えています。
このPWMカウンタは1024になった瞬間に0に戻ってしまいます。この瞬間にPWM出力信号は1(High, 3.3V)になります。
PWMカウンタは増え(20/1024ミリ秒毎に1増える)続け,デューティ値と等しくなった時に,PWM出力信号は0(Low, 0V)になります。
さて,PWM周期より短い周期でデューティ値を変更したらどうなるかは興味深いです。
これはプロセッサの設計がどうなっているかに依存します。
次のようなプログラムでテストしました。
PWM周期はデフォルトで20msになっています。
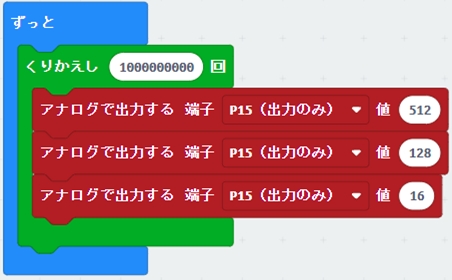
このプログラムではPWM周期より速い周期でのデューティ値変更になっているでしょう。
次の図はこのプログラム実行時のPWM信号です。
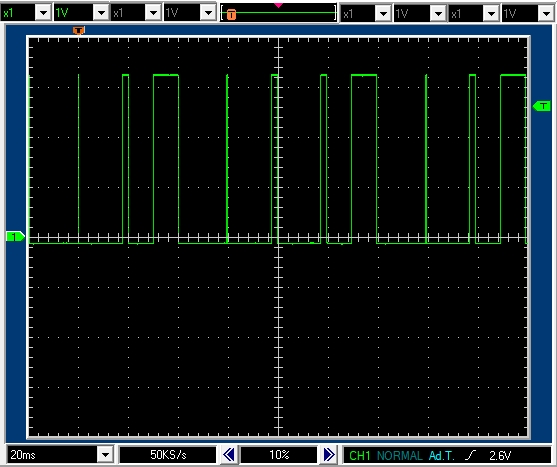
パルスの周期は20msになっているのがわかります。
3種類のパルスが見えています。一番長いのがデューティ値512のパルス,中くらいなのがデューティ値256のパルス,線のようにしか見えない短いのがデューティ値16のパルスのようです。
PWM信号は滅茶苦茶にはなっていませんが,パルス長変更の順番は滅茶苦茶です。
PWM信号生成のメカニズムでは,PWMカウンタがクリアされた瞬間にPWM出力信号はHになり,PWMカウンタの値がデューティ値と等しくなった時にPWM出力信号はLになります。
実際の動作は次のようになっていると考えられます。
そのため,プログラムが続けざまに,PWMデューティ値を設定しても,第1のレジスタの値が変化するだけで,PWM信号の生成には何も影響を与えません。
PWMカウンタがクリアされた瞬間に第1のレジスタに保存されていた値が第2のレジスタにコピーされるので,その時点での最新の第1のレジスタの値がコピーされます。
上記のプログラムでは第1のレジスタの値は高速に変化しているので,PWMカウンタがクリアされた瞬間に第2のレジスタにコピーされる値はその時点での最新の第1のレジスタの値ということになります。
このような理由で,3種類のパルスの発生順はランダムになっていると考えられます。
(もし,プログラムがPWMデューティ値を設定した時に第2のレジスタに直接書き込まれると,パルス幅は滅茶苦茶になります。例えば,デューティ値が512で,PWMカウンタが400くらいのときに,デューティ値256が書き込まれたとすると,その回のパルスはLになることなくPWM周期と同じ長さのパルスになってしまうからです。)