PWMはパルス幅変調(Pulse Width Modulation)といって,ディジタル信号のHとLの長さを変化させて,指令値を作る方法である。
例えば,LEDを高速に点滅させて,点滅が人間の目にわからないようにした状態でHの時間とLの時間の比を変化させるとLEDの明るさが変化したように見える。
モータの駆動時において,高速にスイッチのON-OFFを繰り返し,ONになっている時間とOFFになっている時間の比を変更することに よって,見かけ上,モータにかける電圧を変更する駆動も可能になる。
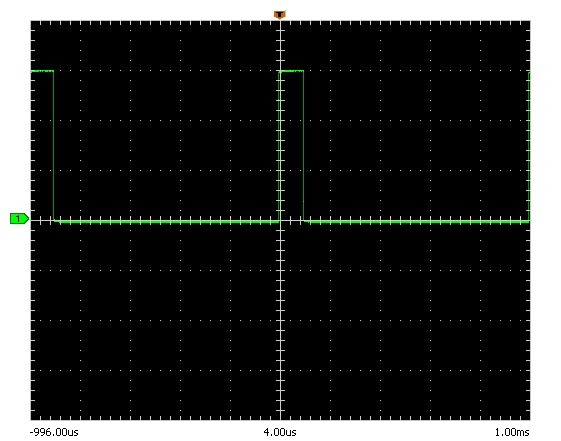
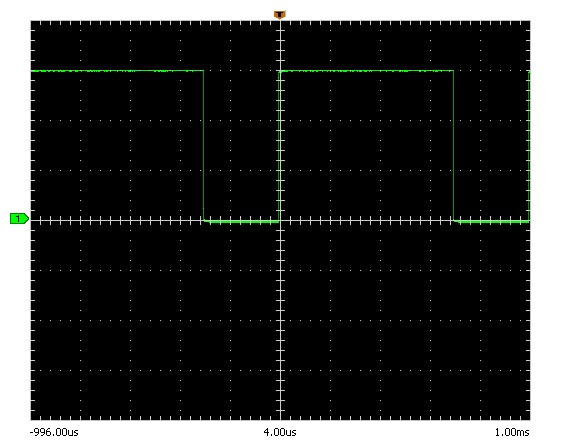
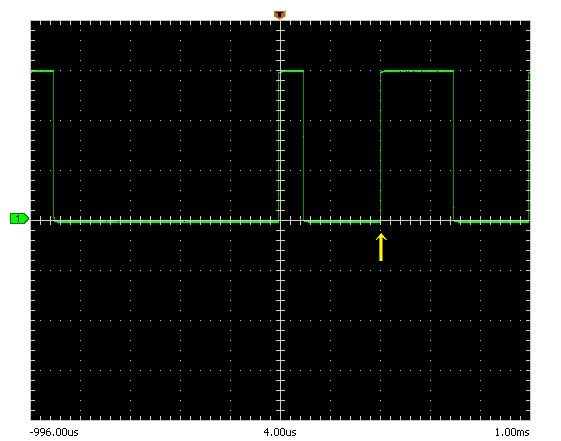
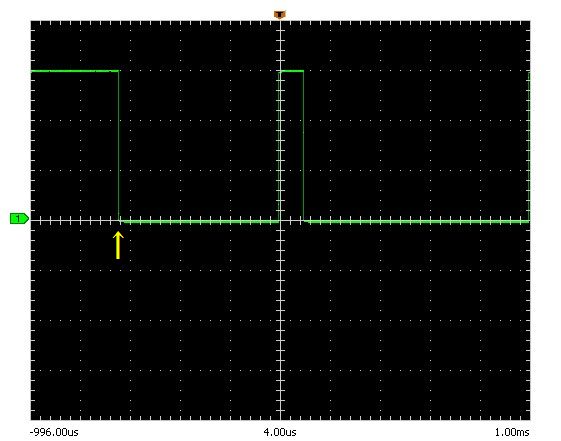
次の図はPWM信号の例である。周期的なON-OFFの信号で,その周期はPWM周期と呼ばれる。また(ONになっている時間)÷ (PWM周期)のことはデューティ比と呼ばれる。
 |
図1.1 PWM信号の例 |
STM32F051はタイマユニットを使って,PWM信号を生成することができる。
PWM周期を与える値Bとデューティ比に関与する値Aを予め与えておくと,動作原理は,次のようになっている。
与えられたクロックによりカウントアップするカウンタがあり,カウンタの値は0からカウントアップし,Bに達すると,0に戻り,再びカウントアップするよ
うになっている。(周期Bでの自走カウンタ)タイマユニットにはビット出力機能があり,カウンタの値と指示された値Aを比較し,カウンタ値の方が小さい時
にHを,大きい時にLを出すようになっている。
その結果,0<カウンタの値<AではHが,A<カウンタの値<BではLが出力され,この出力が繰り返し継続されることになる。
ここで値BはPWM周期を与え,値Aはデューティ比を決めることになる。正確には元になるクロックの周期×BでPWM周期が決まり,A÷Bがデューティ比を表すことになる。
 |
図1.2 PWM信号の生成 |
STM32F051はこのような動作をするタイマユニットを複数持っている。
ここではTIM1というタイマユニットを使うことにする。
TIM1は同じ周期でデューティ比の異なるPWM信号を4つ同時に発生することができる。(4チャンネル出力)
つまり,Bの値は1つだけであるが,Aの値を4つ持つことができる。
まず最初は出力ピンを決める。マニュアルdm00039193.pdfのTable 14.によれば,TIM1_CH1,TIM1_CH2,TIM1_CH3,TIM1_CH4は,AF2の設定でPA8,PA9,PA10,PA11になっていることがわかる。
出力ピンがわかったところで,3つの設定が必要となる。
2.1 GPIOピンの設定
GPIOピンの設定は,クロックを供給し,PA8,PA9,PA10,PA11をAFモードにし,PA8,PA9,PA10,PA11を
TIM1_CH1,TIM1_CH2,TIM1_CH3,TIM1_CH4の機能に変更する。ただしこの設定は最初にやらず,タイマユニットの初期化が終
わってから行う。
init_TIM1Pins();
2.2 タイマユニットの設定
タイマユニットの設定は,与えるクロック周波数を定めるため,システムクロック何個分を1クロックにするかを示すprescaler,Bの値を与えるperiodを与えて行う。この2つの値を設定し,TIM1を有効にし,TIM1のPWM出力も有効にしている。
プログラム例では,TIM1に与えるクロック周波数が100kHzになるように,prescalerに値を与え,100カウント=1msecで1PWM周期にしようとしている。
正確に言うと,プリスケーラカウンタは0からprescalerにセットした値までを繰り返すので,プリスケーラとして1000を与えたい場合には
prescalerの値としては999にしなければならない。よって,TIM1に与えるクロック周波数が100kHzになるように,prescalerに
値を与えるためには,
(SystemCoreClock / 100000 ) - 1
を設定している。
また,periodも同様な仕組みをしているのでperiod=100-1を与えている。リファレンスマニュアルdm00031936.pdf(RM0091)のFigure
86.に説明がある。Figure 86の説明ではARRがperiodの値であり8が設定された例である。カウンタは0から8までの9クロック周期で動作しているのがわかる。
また,CCRの設定値が0から8を取り,0の時デューティ比0%,8の時デューティ比100%になることが読み取れる。
Init_Timer(prescaler, period);
2.3 PWMチャンネルの設定
PWMチャンネルの設定は,設定関数内で,PWMモード1に設定し,とりあえず出力パルス幅は0(これはAの値に対応する)に設定する。
ここで,プリロード設定をとりあえず有効にしておく。あとで効果を検証する。
引数では正論理の出力に設定する。外部接続機器が負論理で信号を受けることになっている場合は引数で負論理を設定する。
Init_PWMChannel(TIM_OCPolarity_High);
2.4 PWMパルス幅設定
PWMのパルス幅は,TIM1のCCR1からCCR4に設定すればよい。ここでは0から100までの値が設定できる。