/*
3軸ディジタルコンパス+3軸加速度モジュール LSM303DLHC
浮動小数点数を表示するためcoocoxのlib/stdio/printf.cは削除してGCCのprintfを使う
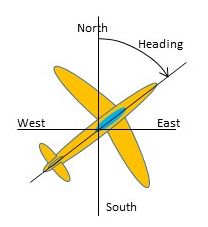
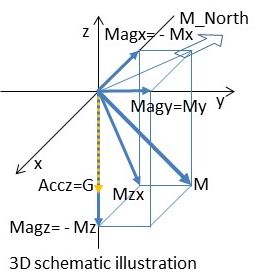
◯mag出力
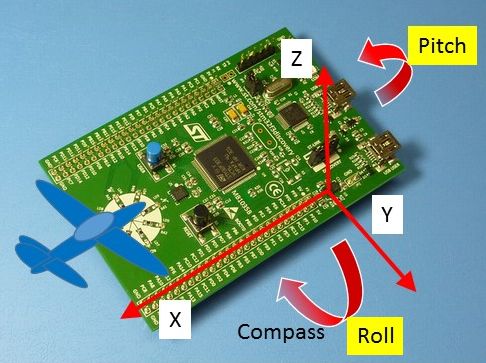
mcuカードをstm32f3discoveryの文字が見えるようにおいて
LSM303DLHCのx軸は下辺向き,y軸は右辺向き,z軸は部品面の上向き。右手系になっている
それぞれ地球のS極側(地理的には北の地中方向)を指すと正の値が出てくる
意外と鉛直成分の絶対値が大きい
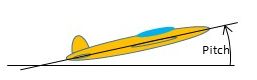
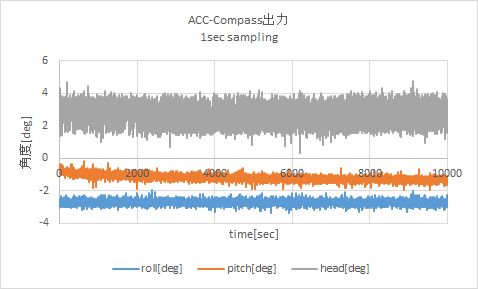
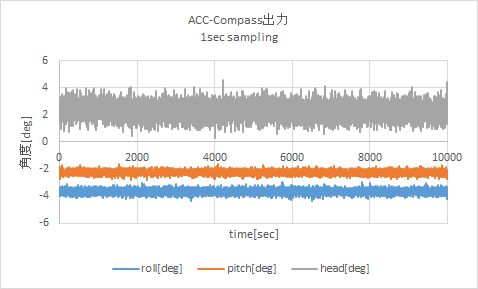
◯ACC出力
mcuカードをstm32f3discoveryの文字が見えるようにおいて
前方を上げると buf0 -
前方を下げると buf0 +
右を上げると buf1 +
右を下げると buf1 -
水平で buf2 +
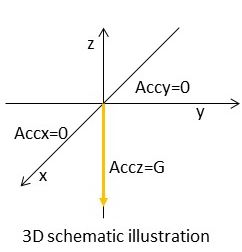
すなわちx軸は下辺向き,y軸は右辺向き,z軸は部品面の上向き。右手系になっているが
地球に重力で引っ張られる方向と逆方向に軸が向くと正の値を出力する
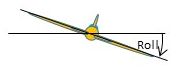
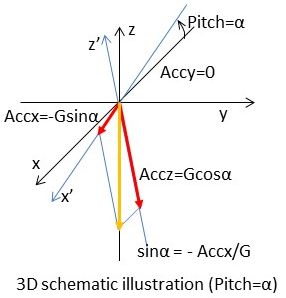
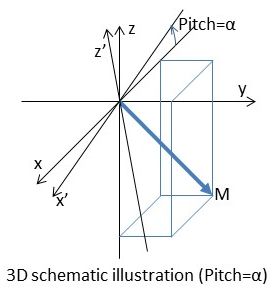
オイラー角 ピッチ 前が上がると+ (buf0の符号反転)
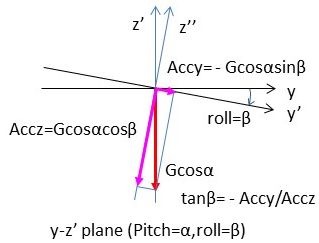
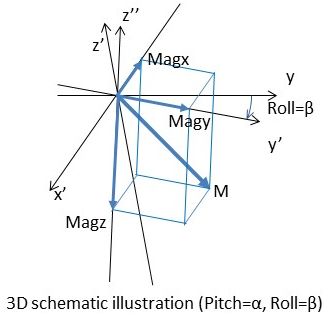
オイラー角ロール 右が下がると+ (buf1の符号反転)
*/
/* Includes ------------------------------------------------------------------*/
#include <stm32f30x.h>
#include <stdint.h>
#include "stm32f30x_conf.h"
#include "stm32f3_discovery.h"
#include <stdio.h>
#include <math.h>
#include "stm32f3_discovery_lsm303dlhc.h"
typedef struct {
float roll;
float pitch;
float headingvalue;
} angle_t;
typedef struct {
float min;
float max;
float mean;
float factor;
} factor_t;
#define
PI
(float)3.14159265f
#define
declination
(float)7.0f
//西へ7度,磁北がずれている
#define rad_declination (float)(declination/180.0f*PI)
void initIntervaltimer(int32_t frequency);
void getAngle(angle_t *angle);
void initCompass(void);
void readCompass_Acc(float* pfData);
void readCompass_Mag(float* pfData);
void setfactorMag(void);
void setfactorAcc(void);
void showHeading(float head, int32_t flag);
void showAngle(float rotz);
float getRotZ(void);
factor_t fctMag[3];
factor_t fctAcc[3];
angle_t angle={0.,0.,0.};
float rotz;
volatile int request=0;
int mode=0; //mode0:北方向表示 mode1:水平方向表示
int main()
{
int i=0;
int idle=0;
initCompass();
setfactorMag();
setfactorAcc();
/* Configure LED3 - LED10 on STM32F3-Discovery */
STM_EVAL_LEDInit(LED3);
STM_EVAL_LEDInit(LED4);
STM_EVAL_LEDInit(LED5);
STM_EVAL_LEDInit(LED6);
STM_EVAL_LEDInit(LED7);
STM_EVAL_LEDInit(LED8);
STM_EVAL_LEDInit(LED9);
STM_EVAL_LEDInit(LED10);
/* Initialize User_Button on STM32F3-Discovery */
STM_EVAL_PBInit(BUTTON_USER, BUTTON_MODE_GPIO);
printf("time,roll[deg],pitch[deg],head[deg],rotZ[deg]\r\n");
/* SysTick end of count event each 1ms (1000Hz)*/
initIntervaltimer(1000);
while(1) {
while (request==0);
angle.roll*=180.0f/PI;
angle.pitch*=180.0f/PI;
angle.headingvalue*=180.0f/PI;
rotz*=180.0f/PI;
printf("%7.2f, %7.2f, %7.2f, %7.2f\n",angle.roll,angle.pitch,angle.headingvalue,rotz);
request=0;
i++;
if (idle==0) {
if
(STM_EVAL_PBGetState(BUTTON_USER)== SET) { //if user's button
pushed)
mode=1-mode;
idle=1;
}
} else {
if (10<++idle) idle=0;
}
if (mode==0) {
int32_t flag=0;
if (angle.roll<-90.f || 90.f<angle.roll) flag=1;
showHeading(angle.headingvalue,flag);
} else {
showAngle(rotz);
}
}
while(1);
}
//head:方向角 北から東回りに増加[deg]
//flag:表面が鉛直方向上向き:0 下向き:1
void showHeading(float head, int32_t flag)
{
head+=11.25f;
if (360.f<=head) head-=360.f;
int num=head/360.f*16.f;
GPIOE ->ODR &= ~0xff00; //turn all LED off
if (flag==1) {
num=(16-num)&15;
}
switch (num) {
case 0:
STM_EVAL_LEDOn(LED3); //Turn LED3 On
break;
case 1:
STM_EVAL_LEDOn(LED3); //Turn LED3 On
STM_EVAL_LEDOn(LED4); //Turn LED4 On
break;
case 2:
STM_EVAL_LEDOn(LED4); //Turn LED4 On
break;
case 3:
STM_EVAL_LEDOn(LED4); //Turn LED4 On
STM_EVAL_LEDOn(LED6); //Turn LED6 On
break;
case 4:
STM_EVAL_LEDOn(LED6); //Turn LED6 On
break;
case 5:
STM_EVAL_LEDOn(LED6); //Turn LED6 On
STM_EVAL_LEDOn(LED8); //Turn LED8 On
break;
case 6:
STM_EVAL_LEDOn(LED8); //Turn LED8 On
break;
case 7:
STM_EVAL_LEDOn(LED8); //Turn LED8 On
STM_EVAL_LEDOn(LED10); //Turn LED10 On
break;
case 8:
STM_EVAL_LEDOn(LED10); //Turn LED10 On
break;
case 9:
STM_EVAL_LEDOn(LED10); //Turn LED10 On
STM_EVAL_LEDOn(LED9); //Turn LED9 On
break;
case 10:
STM_EVAL_LEDOn(LED9); //Turn LED9 On
break;
case 11:
STM_EVAL_LEDOn(LED9); //Turn LED9 On
STM_EVAL_LEDOn(LED7); //Turn LED7 On
break;
case 12:
STM_EVAL_LEDOn(LED7); //Turn LED7 On
break;
case 13:
STM_EVAL_LEDOn(LED7); //Turn LED7 On
STM_EVAL_LEDOn(LED5); //Turn LED5 On
break;
case 14:
STM_EVAL_LEDOn(LED5); //Turn LED5 On
break;
case 15:
STM_EVAL_LEDOn(LED5); //Turn LED5 On
STM_EVAL_LEDOn(LED3); //Turn LED3 On
break;
default:
break;
}
}
void showAngle(float rotz)
{
GPIOE ->ODR &= ~0xff00; //turn all LED off
//if (90.f<rotz) rotz=180.f-rotz;
//if (rotz<-90.f) rotz=-180.f+rotz;
if (rotz<0.f) rotz=180.f+rotz;
rotz+=11.25f;
int num=((int)(rotz/90.f*3.999f))&7;
//printf("%7.2f %5d\n",rotz,num);
switch (num) {
case 7:
STM_EVAL_LEDOn(LED3); //Turn LED3 On
STM_EVAL_LEDOn(LED10); //Turn LED10 On
STM_EVAL_LEDOn(LED4); //Turn LED4 On
STM_EVAL_LEDOn(LED9); //Turn LED9 On
break;
case 6:
STM_EVAL_LEDOn(LED4); //Turn LED4 On
STM_EVAL_LEDOn(LED9); //Turn LED9 On
break;
case 5:
STM_EVAL_LEDOn(LED4); //Turn LED4 On
STM_EVAL_LEDOn(LED9); //Turn LED9 On
STM_EVAL_LEDOn(LED6); //Turn LED6 On
STM_EVAL_LEDOn(LED7); //Turn LED7 On
break;
case 4:
STM_EVAL_LEDOn(LED6); //Turn LED6 On
STM_EVAL_LEDOn(LED7); //Turn LED7 On
break;
case 3:
STM_EVAL_LEDOn(LED6); //Turn LED6 On
STM_EVAL_LEDOn(LED7); //Turn LED7 On
STM_EVAL_LEDOn(LED5); //Turn LED5 On
STM_EVAL_LEDOn(LED8); //Turn LED8 On
break;
case 2:
STM_EVAL_LEDOn(LED5); //Turn LED5 On
STM_EVAL_LEDOn(LED8); //Turn LED8 On
break;
case 1:
STM_EVAL_LEDOn(LED5); //Turn LED5 On
STM_EVAL_LEDOn(LED8); //Turn LED8 On
STM_EVAL_LEDOn(LED3); //Turn LED3 On
STM_EVAL_LEDOn(LED10); //Turn LED10 On
break;
case 0:
STM_EVAL_LEDOn(LED3); //Turn LED3 On
STM_EVAL_LEDOn(LED10); //Turn LED10 On
break;
default:
break;
}
}
/*インターバルタイマー割り込み初期設定 割り込み周波数[Hz]を引数で渡す*/
void initIntervaltimer(int32_t frequency)
{
RCC_ClocksTypeDef RCC_Clocks;
RCC_GetClocksFreq(&RCC_Clocks);
SysTick_Config(RCC_Clocks.HCLK_Frequency / frequency);
}
void SysTick_Handler(void)
{
static int32_t count=0;
count++;
if (count==100) {
count=0;
getAngle(&angle);
rotz=getRotZ();
request = 1;
}
}
void setfactorMag(void)
{
int i;
/*mag ( 78.26 -439.13 400.00) ( -78.26 -482.61 339.13) (-268.29 -404.88 351.22)*/
fctMag[0].min = -439.13;
fctMag[0].max = 400.00;
fctMag[1].min = -482.61;
fctMag[1].max = 339.13;
fctMag[2].min = -404.88;
fctMag[2].max = 351.22;
for(i=0; i<3; i++) {
fctMag[i].mean=(fctMag[i].min+fctMag[i].max)/2.0;
fctMag[i].factor=200./(fctMag[i].max-fctMag[i].min);
}
}
void setfactorAcc(void)
{
int i;
/*acc (-688.00 -1067.00 1028.00) (-510.00 -1004.00 1017.00) ( 567.00 -1073.00 1033.00)*/
fctAcc[0].min = -1067.00;
fctAcc[0].max = 1028.00;
fctAcc[1].min = -1004.00;
fctAcc[1].max = 1017.00;
fctAcc[2].min = -1073.00;
fctAcc[2].max = 1033.00;
for(i=0; i<3; i++) {
fctAcc[i].mean=(fctAcc[i].min+fctAcc[i].max)/2.0;
fctAcc[i].factor=200./(fctAcc[i].max-fctAcc[i].min);
}
}
float getRotZ(void)
{
float AccBuffer[3];
/* Accx:AccBuffer[0], Accy:AccBuffer[1], Accz:AccBuffer[2]*/
//float fNormAcc,RollAng, PitchAng;
int i;
readCompass_Acc(AccBuffer);
for (i=0; i<3; i++) {
AccBuffer[i]=(AccBuffer[i]-fctAcc[i].mean)*fctAcc[i].factor;
}
//printf("acc %7.2f %7.2f %7.2f\n",AccBuffer[0],AccBuffer[1],AccBuffer[2]);
//fNormAcc =
sqrt((float)(AccBuffer[0]*AccBuffer[0])+(AccBuffer[1]*AccBuffer[1])+(AccBuffer[2]*AccBuffer[2]));
//PitchAng = -asin((float)(AccBuffer[0]/fNormAcc));
//RollAng = -atan2((float)AccBuffer[1],(float)AccBuffer[2]); /*分子,分母の順*/
rotz = atan2(-(float)AccBuffer[0],-(float)AccBuffer[1]); /*分子,分母の順*/
return rotz;
}
void getAngle(angle_t *angle)
{
float AccBuffer[3];
/* Accx:AccBuffer[0], Accy:AccBuffer[1], Accz:AccBuffer[2]*/
float fNormAcc,RollAng, PitchAng;
int i;
readCompass_Acc(AccBuffer);
for (i=0; i<3; i++) {
AccBuffer[i]=(AccBuffer[i]-fctAcc[i].mean)*fctAcc[i].factor;
}
//printf("acc %7.2f %7.2f %7.2f\n",AccBuffer[0],AccBuffer[1],AccBuffer[2]);
fNormAcc = sqrt((float)(AccBuffer[0]*AccBuffer[0])+(AccBuffer[1]*AccBuffer[1])+(AccBuffer[2]*AccBuffer[2]));
PitchAng = -asin((float)(AccBuffer[0]/fNormAcc));
RollAng = -atan2((float)AccBuffer[1],(float)AccBuffer[2]); /*分子,分母の順*/
angle->pitch = PitchAng;
angle->roll = RollAng;
float MagBuffer[3] = {0.0f};
/* Magx:MagBuffer[0], Magy:MagBuffer[1], Magz:MagBuffer[2]*/
float costhy,sinthy,costhx,sinthx;
float Mx,My;
float HeadingValue = 0.0f;
readCompass_Mag(MagBuffer);
for (i=0; i<3; i++) {
MagBuffer[i]=(MagBuffer[i]-fctMag[i].mean)*fctMag[i].factor;
}
//printf("mag %7.2f %7.2f %7.2f\n",MagBuffer[0],MagBuffer[1],MagBuffer[2]);
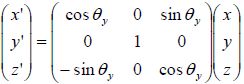
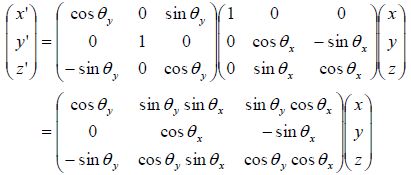
costhy=cos((float)PitchAng);
sinthy=sin((float)PitchAng);
costhx=cos(-(float)RollAng);
sinthx=sin(-(float)RollAng);
Mx=costhy*MagBuffer[0]+sinthy*sinthx*MagBuffer[1]+sinthy*costhx*MagBuffer[2];
My=costhx*MagBuffer[1]-sinthx*MagBuffer[2];
HeadingValue = atan2(-(float)My,-(float)Mx)-rad_declination;
while (HeadingValue < 0) {
HeadingValue = HeadingValue + 2.0f*PI;
}
while (2.0f*PI <= HeadingValue) {
HeadingValue = HeadingValue - 2.0f*PI;
}
angle->headingvalue = HeadingValue;
}
void initCompass(void)
{
LSM303DLHCMag_InitTypeDef LSM303DLHC_InitStructure;
LSM303DLHCAcc_InitTypeDef LSM303DLHCAcc_InitStructure;
LSM303DLHCAcc_FilterConfigTypeDef LSM303DLHCFilter_InitStructure;
/* Configure MEMS magnetometer main parameters: temp, working mode, full Scale and Data rate */
LSM303DLHC_InitStructure.Temperature_Sensor = LSM303DLHC_TEMPSENSOR_DISABLE;
LSM303DLHC_InitStructure.MagOutput_DataRate =LSM303DLHC_ODR_30_HZ ;
LSM303DLHC_InitStructure.MagFull_Scale = LSM303DLHC_FS_8_1_GA;
LSM303DLHC_InitStructure.Working_Mode = LSM303DLHC_CONTINUOS_CONVERSION;
LSM303DLHC_MagInit(&LSM303DLHC_InitStructure);
/* Fill the accelerometer structure */
LSM303DLHCAcc_InitStructure.Power_Mode = LSM303DLHC_NORMAL_MODE;
LSM303DLHCAcc_InitStructure.AccOutput_DataRate = LSM303DLHC_ODR_50_HZ;
LSM303DLHCAcc_InitStructure.Axes_Enable= LSM303DLHC_AXES_ENABLE;
LSM303DLHCAcc_InitStructure.AccFull_Scale = LSM303DLHC_FULLSCALE_2G;
LSM303DLHCAcc_InitStructure.BlockData_Update = LSM303DLHC_BlockUpdate_Continous;
LSM303DLHCAcc_InitStructure.Endianness=LSM303DLHC_BLE_LSB;
LSM303DLHCAcc_InitStructure.High_Resolution=LSM303DLHC_HR_ENABLE;
/* Configure the accelerometer main parameters */
LSM303DLHC_AccInit(&LSM303DLHCAcc_InitStructure);
/* Fill the accelerometer LPF structure */
LSM303DLHCFilter_InitStructure.HighPassFilter_Mode_Selection =LSM303DLHC_HPM_NORMAL_MODE;
LSM303DLHCFilter_InitStructure.HighPassFilter_CutOff_Frequency = LSM303DLHC_HPFCF_16;
LSM303DLHCFilter_InitStructure.HighPassFilter_AOI1 = LSM303DLHC_HPF_AOI1_DISABLE;
LSM303DLHCFilter_InitStructure.HighPassFilter_AOI2 = LSM303DLHC_HPF_AOI2_DISABLE;
/* Configure the accelerometer LPF main parameters */
LSM303DLHC_AccFilterConfig(&LSM303DLHCFilter_InitStructure);
}
/**
* @brief Read LSM303DLHC output register, and calculate the acceleration
ACC=(1/SENSITIVITY)* (out_h*256+out_l)/16 (12 bit rappresentation)
* @param pnData: pointer to float buffer where to store data
* @retval None
*/
void readCompass_Acc(float* pfData)
{
#define
LSM_Acc_Sensitivity_2g
(float)
1.0f
/*!< accelerometer sensitivity with 2 g full scale [LSB/mg] */
#define
LSM_Acc_Sensitivity_4g
(float)
0.5f
/*!< accelerometer sensitivity with 4 g full scale [LSB/mg] */
#define
LSM_Acc_Sensitivity_8g
(float)
0.25f
/*!< accelerometer sensitivity with 8 g full scale [LSB/mg] */
#define LSM_Acc_Sensitivity_16g
(float)
0.0834f /*!<
accelerometer sensitivity with 12 g full scale [LSB/mg] */
int16_t pnRawData[3];
uint8_t ctrlx[2];
uint8_t buffer[6], cDivider;
uint8_t i = 0;
float LSM_Acc_Sensitivity = LSM_Acc_Sensitivity_2g;
/* Read the register content */
LSM303DLHC_Read(ACC_I2C_ADDRESS, LSM303DLHC_CTRL_REG4_A, ctrlx,2);
LSM303DLHC_Read(ACC_I2C_ADDRESS, LSM303DLHC_OUT_X_L_A, buffer, 6);
if(ctrlx[1]&0x40)
cDivider=64;
else
cDivider=16;
/* check in the control register4 the data alignment*/
if(!(ctrlx[0] & 0x40) || (ctrlx[1] & 0x40)) /* Little Endian Mode or FIFO mode */
{
for(i=0; i<3; i++)
{
pnRawData[i]=((int16_t)((uint16_t)buffer[2*i+1] << 8) +
buffer[2*i])/cDivider;
}
}
else /* Big Endian Mode */
{
for(i=0; i<3; i++)
pnRawData[i]=((int16_t)((uint16_t)buffer[2*i] << 8) +
buffer[2*i+1])/cDivider;
}
/* Read the register content */
LSM303DLHC_Read(ACC_I2C_ADDRESS, LSM303DLHC_CTRL_REG4_A, ctrlx,2);
if(ctrlx[1]&0x40)
{
/* FIFO mode */
LSM_Acc_Sensitivity = 0.25;
}
else
{
/* normal mode */
/* switch the sensitivity value set in the CRTL4*/
switch(ctrlx[0] & 0x30)
{
case LSM303DLHC_FULLSCALE_2G:
LSM_Acc_Sensitivity = LSM_Acc_Sensitivity_2g;
break;
case LSM303DLHC_FULLSCALE_4G:
LSM_Acc_Sensitivity = LSM_Acc_Sensitivity_4g;
break;
case LSM303DLHC_FULLSCALE_8G:
LSM_Acc_Sensitivity = LSM_Acc_Sensitivity_8g;
break;
case LSM303DLHC_FULLSCALE_16G:
LSM_Acc_Sensitivity = LSM_Acc_Sensitivity_16g;
break;
}
}
/* Obtain the mg value for the three axis */
for(i=0; i<3; i++)
{
pfData[i]=(float)pnRawData[i]/LSM_Acc_Sensitivity;
}
}
/**
* @brief calculate the magnetic field Magn.
* @param pfData: pointer to the data out
* @retval None
*/
void readCompass_Mag(float* pfData)
{
static uint8_t buffer[6] = {0};
uint8_t CTRLB = 0;
uint16_t Magn_Sensitivity_XY = 0, Magn_Sensitivity_Z = 0;
uint8_t i =0;
LSM303DLHC_Read(MAG_I2C_ADDRESS, LSM303DLHC_CRB_REG_M, &CTRLB, 1);
LSM303DLHC_Read(MAG_I2C_ADDRESS, LSM303DLHC_OUT_X_H_M, buffer, 1);
LSM303DLHC_Read(MAG_I2C_ADDRESS, LSM303DLHC_OUT_X_L_M, buffer+1, 1);
LSM303DLHC_Read(MAG_I2C_ADDRESS, LSM303DLHC_OUT_Y_H_M, buffer+2, 1);
LSM303DLHC_Read(MAG_I2C_ADDRESS, LSM303DLHC_OUT_Y_L_M, buffer+3, 1);
LSM303DLHC_Read(MAG_I2C_ADDRESS, LSM303DLHC_OUT_Z_H_M, buffer+4, 1);
LSM303DLHC_Read(MAG_I2C_ADDRESS, LSM303DLHC_OUT_Z_L_M, buffer+5, 1);
/* Switch the sensitivity set in the CRTLB*/
switch(CTRLB & 0xE0)
{
case LSM303DLHC_FS_1_3_GA:
Magn_Sensitivity_XY = LSM303DLHC_M_SENSITIVITY_XY_1_3Ga;
Magn_Sensitivity_Z = LSM303DLHC_M_SENSITIVITY_Z_1_3Ga;
break;
case LSM303DLHC_FS_1_9_GA:
Magn_Sensitivity_XY = LSM303DLHC_M_SENSITIVITY_XY_1_9Ga;
Magn_Sensitivity_Z = LSM303DLHC_M_SENSITIVITY_Z_1_9Ga;
break;
case LSM303DLHC_FS_2_5_GA:
Magn_Sensitivity_XY = LSM303DLHC_M_SENSITIVITY_XY_2_5Ga;
Magn_Sensitivity_Z = LSM303DLHC_M_SENSITIVITY_Z_2_5Ga;
break;
case LSM303DLHC_FS_4_0_GA:
Magn_Sensitivity_XY = LSM303DLHC_M_SENSITIVITY_XY_4Ga;
Magn_Sensitivity_Z = LSM303DLHC_M_SENSITIVITY_Z_4Ga;
break;
case LSM303DLHC_FS_4_7_GA:
Magn_Sensitivity_XY = LSM303DLHC_M_SENSITIVITY_XY_4_7Ga;
Magn_Sensitivity_Z = LSM303DLHC_M_SENSITIVITY_Z_4_7Ga;
break;
case LSM303DLHC_FS_5_6_GA:
Magn_Sensitivity_XY = LSM303DLHC_M_SENSITIVITY_XY_5_6Ga;
Magn_Sensitivity_Z = LSM303DLHC_M_SENSITIVITY_Z_5_6Ga;
break;
case LSM303DLHC_FS_8_1_GA:
Magn_Sensitivity_XY = LSM303DLHC_M_SENSITIVITY_XY_8_1Ga;
Magn_Sensitivity_Z = LSM303DLHC_M_SENSITIVITY_Z_8_1Ga;
break;
}
for(i=0; i<2; i++)
{
pfData[i]=(float)((int16_t)(((uint16_t)buffer[2*i] << 8) +
buffer[2*i+1])*1000)/Magn_Sensitivity_XY;
}
pfData[2]=(float)((int16_t)(((uint16_t)buffer[4] << 8) + buffer[5])*1000)/Magn_Sensitivity_Z;
}
uint32_t LSM303DLHC_TIMEOUT_UserCallback(void)
{
return 0;
}
|