/*
* L3GD20 3軸ジャイロセンサジュール
*/
/* Includes ------------------------------------------------------------------*/
#include <stm32f30x.h>
#include <stdint.h>
#include "stm32f30x_conf.h"
#include "stm32f3_discovery.h"
#include <stdio.h>
#include "stm32f3_discovery_l3gd20.h"
void initGyroscope(void);
void readGyroscope_AngRate(float* pfData);
void initIntervaltimer(int32_t frequency);
float Buffer[3] = {0.0,1.0,0.0};
volatile int request = 0; /*1:request for print 0:nothing*/
int main()
{
initGyroscope();
/* SysTick end of count event each 1ms (1000Hz)*/
initIntervaltimer(1000);
int time=0;
printf("Gyroscope Test\r\n");
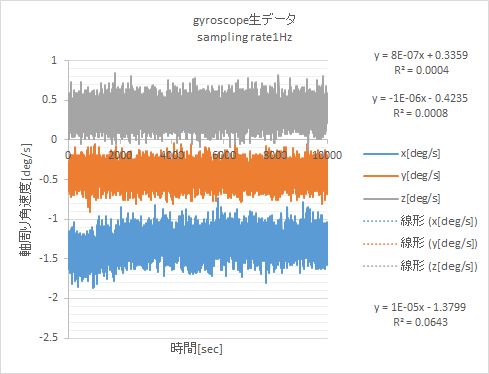
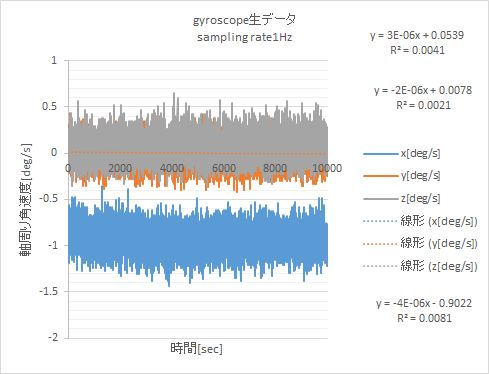
printf("L3GD20 FULLSCALE = 500 deg/s\r\n");
printf("time[sec],x[deg/s],y[deg/s],z[deg/s]\r\n");
while(time<=10000) {
if (request==1) {
printf("%5d,
%10.7f, %10.7f, %10.7f\n",time++,Buffer[0],Buffer[1],Buffer[2]);
request = 0;
}
}
while(1);
}
/*インターバルタイマー割り込み初期設定 割り込み周波数[Hz]を引数で渡す*/
void initIntervaltimer(int32_t frequency)
{
RCC_ClocksTypeDef RCC_Clocks;
RCC_GetClocksFreq(&RCC_Clocks);
SysTick_Config(RCC_Clocks.HCLK_Frequency / frequency);
}
void SysTick_Handler(void)
{
static int32_t count=0;
count++;
if (count==1000) {
count=0;
readGyroscope_AngRate(Buffer);
request = 1;
}
}
void initGyroscope(void)
{
L3GD20_InitTypeDef L3GD20_InitStructure;
L3GD20_FilterConfigTypeDef L3GD20_FilterStructure;
/* Configure Mems L3GD20 */
L3GD20_InitStructure.Power_Mode = L3GD20_MODE_ACTIVE;
L3GD20_InitStructure.Output_DataRate = L3GD20_OUTPUT_DATARATE_1;
L3GD20_InitStructure.Axes_Enable = L3GD20_AXES_ENABLE;
L3GD20_InitStructure.Band_Width = L3GD20_BANDWIDTH_4;
L3GD20_InitStructure.BlockData_Update = L3GD20_BlockDataUpdate_Continous;
L3GD20_InitStructure.Endianness = L3GD20_BLE_LSB;
L3GD20_InitStructure.Full_Scale = L3GD20_FULLSCALE_500;
L3GD20_Init(&L3GD20_InitStructure);
L3GD20_FilterStructure.HighPassFilter_Mode_Selection =L3GD20_HPM_NORMAL_MODE_RES;
L3GD20_FilterStructure.HighPassFilter_CutOff_Frequency = L3GD20_HPFCF_0;
L3GD20_FilterConfig(&L3GD20_FilterStructure) ;
L3GD20_FilterCmd(L3GD20_HIGHPASSFILTER_ENABLE);
}
void readGyroscope_AngRate(float* pfData)
{
#define
L3G_Sensitivity_250dps (float)
114.285f /*!<
gyroscope sensitivity with 250 dps full scale [LSB/dps] */
#define
L3G_Sensitivity_500dps (float)
57.1429f /*!< gyroscope
sensitivity with 500 dps full scale [LSB/dps] */
#define L3G_Sensitivity_2000dps
(float) 14.285f
/*!< gyroscope sensitivity with 2000
dps full scale [LSB/dps] */
uint8_t tmpbuffer[6] ={0};
int16_t RawData[3] = {0};
uint8_t tmpreg = 0;
float sensitivity = 0;
int i =0;
L3GD20_Read(&tmpreg,L3GD20_CTRL_REG4_ADDR,1);
L3GD20_Read(tmpbuffer,L3GD20_OUT_X_L_ADDR,6);
/* check in the control register 4 the data alignment (Big Endian or Little Endian)*/
if(!(tmpreg & 0x40))
{
for(i=0; i<3; i++)
{
RawData[i]=(int16_t)(((uint16_t)tmpbuffer[2*i+1] << 8) +
tmpbuffer[2*i]);
}
}
else
{
for(i=0; i<3; i++)
{
RawData[i]=(int16_t)(((uint16_t)tmpbuffer[2*i] << 8) +
tmpbuffer[2*i+1]);
}
}
/* Switch the sensitivity value set in the CRTL4 */
switch(tmpreg & 0x30)
{
case 0x00:
sensitivity=L3G_Sensitivity_250dps;
break;
case 0x10:
sensitivity=L3G_Sensitivity_500dps;
break;
case 0x20:
sensitivity=L3G_Sensitivity_2000dps;
break;
}
/* divide by sensitivity */
for(i=0; i<3; i++)
{
pfData[i]=(float)RawData[i]/sensitivity;
}
}
uint32_t L3GD20_TIMEOUT_UserCallback(void)
{
return 0;
}
|