例えば,LEDを高速に点滅させて,点滅が人間の目にわからないようにした状態でHの時間とLの時間の比を変化させるとLEDの明るさが変化したように見える。
モータの駆動時において,高速にスイッチのON-OFFを繰り返し,ONになっている時間とOFFになっている時間の比を変更することに よって,見かけ上,モータにかける電圧を変更する駆動も可能になる。
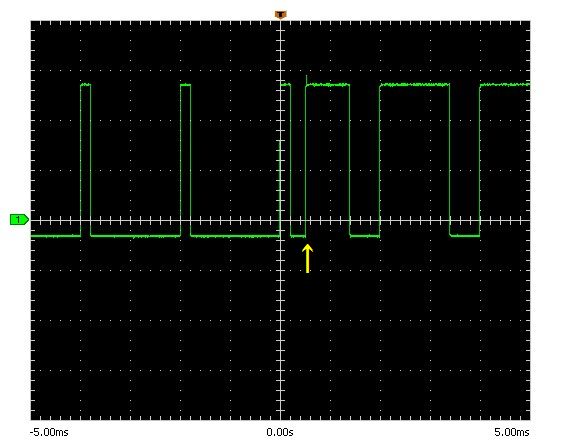
次の図はPWM信号の例である。周期的なON-OFFの信号で,その周期はPWM周期と呼ばれる。また(ONになっている時間)÷ (PWM周期)のことはデューティ比と呼ばれる。
図1.1 PWM信号の例
STM32F303はタイマユニットがあるのでそれを用いればよいが,ソフトウェアのsystick割り込み(インターバルタイマ割り込み)を使ってPWM信号を生成することができる。
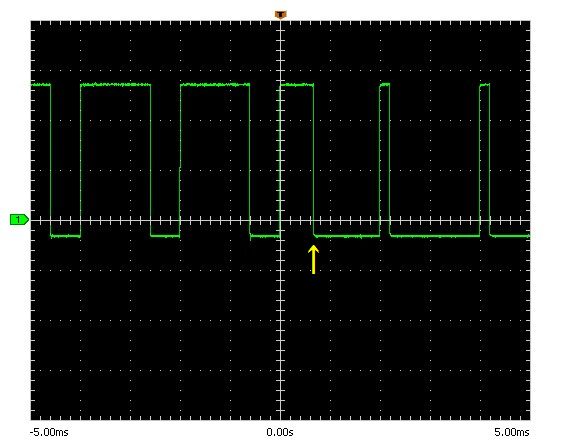
PWM周期を与える値Bとデューティ比に関与する値Aを予め与えておくと,動作原理は,次のようになっている。
インターバルタイマ割り込み処理により,割り込み発生ごとに割り込みルーチン内でカウンタの値を0からカウントアップし,Bに達すると,0に戻り,再びカ
ウントアップするようにしておく。(周期Bでの自走カウンタ)割り込みルーチン内でカウンタの値と指示された値Aを比較し,カウンタ値の方が小さい時
にHを,大きい時にLを指定されたGPIOピンに出すようにしておけば良い。
その結果,0<カウンタの値<AではHが,A<カウンタの値<BではLが出力され,この出力が繰り返し継続されることになる。
ここで値BはPWM周期を与え,値Aはデューティ比を決めることになる。正確には割り込み周期×BでPWM周期が決まり,A÷Bがデューティ比を表すことになる。
図1.2 PWM信号の生成