「よむぞう」 7セグ表示器対応OCR

利用の手引
1. 概要
(1) 機能
「よむぞう」は計測器の表示器から数字を読み取って,音声で読み上げ,ファイルに保存します。 次のような2つの使い方が想定されます。
- アンドロイドデバイスを固定して,連続して数字を読み取り,一定間隔でファイルに保存する。
- アンドロイドデバイスを手に持って,1つだけ数字を読み取り,ファイルに保存する。
読み取った値を音声読み上げします。この機能により,視覚に障がいを持つ方も使うことができます。
(2) 使用上の留意点
今のところ,「よむぞう」は認識したい数字文字列の場所を自動的に判断できません。 そのため後で述べるように,ユーザは数字文字列を認識枠に正しく合わせる必要があります。
2. 最初の起動
「よむぞう」はデバイスのカメラ,ストレージを使用します。
最初の起動時に,カメラ,ストレージ利用の許可を求められますので,許可してください。
3. 機器の固定
数字の読み取りを連続して行う時は,計測器の測定値表示部とデバイスのカメラの両方を保持器具を使って固定して使うことを推奨します。
この段階では測定器の7セグ表示器がほぼスクリーンの中央に来るようにしておきます。

デバイスを固定した使い方の例
カメラは表示器の正面に置き,カメラの光軸を表示器にまっすぐに向ける必要があります。
| カメラの位置 | コメント |
|---|---|
OK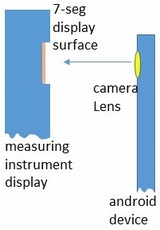 |
問題ありません。 |
NG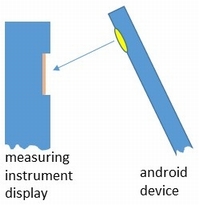 |
カメラの向きが悪く,正しく認識できません。 |
NG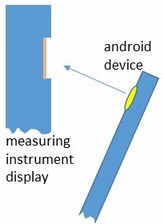 |
カメラの向きが悪く,正しく認識できません。 |
4. ピント合わせ
 |
ピント合わせボタンを押すと,認識枠内のピントを合わせます。 このボタンを使わなくても,画面をタップしても,同じようにピントを合わせます。 |
5. 採光
不均一な影や照明の映り込みがないようにします。
| 画面の様子 | コメント |
|---|---|
OK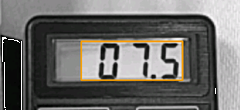 |
問題ありません。 |
NG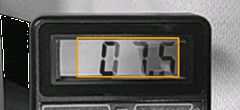 |
表示器上に不均一な影があり,正しく認識できません。 |
NG |
表示器上に照明が映り込んでおり,正しく認識できません。 |
6. 数字種の設定
画面右上のメニュー(縦に点が3つ並んでいる)から「動作モード」を選んで,認識対象の数字種を選定してください。
| 1 |  |
白地に黒の7セグ数字 (7-seg LCD) |
| 2 |  |
黒地に白の7セグ数字 (7-seg LED),白以外の発光文字でもこれが適当かもしれません。 |
| 3 |  |
黒地に赤の7セグ数字 (7-seg LED),'2'の方が適当な場合があります。 |
| 4 |  |
黒地に緑の7セグ数字 (7-seg LED),'2'の方が適当な場合があります。 |
| 5 |  |
白地に黒の通常数字 (bitmap LCD) |
| 6 |  |
黒地に白の通常数字 (bitmap LCD) |
 |
7セグ数字 |
 |
通常数字 |
7-seg LEDの中には,人間の目には普通に見えても,カメラで撮影されスクリーン上に表示されている文字が点滅していて数字を読み取れないものがあります。 カメラのシャッタースピードを遅くすれば,この問題は解決できるのですが,Androidデバイスのカメラでは,多くの場合シャッタースピードを遅くすることができません。 その場合にはカメラレンズの前にNDフィルタを設置して,カメラへの光量を減少させることによって,シャッタースピードを遅くすることができ,正しく数字を読み取れるようにすることができます。 NDフィルタの代わりに,色セロファンを使ってもうまくいきます。
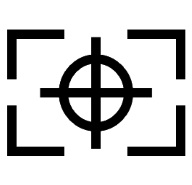
7. 認識枠あわせ
ズームボタンによる拡大率の設定,左右上下ボタンによる認識枠の位置調整,文字幅ボタンによる文字幅調整によって,測定器の表示部を認識枠に合わせます。
認識枠の上部の線が,数字の最上部に接し,認識枠の下部の線が,数字の最下部に接するように合わせます。
最初にズームボタンで数字文字列の高さを合わせておくと合わせやすいです。

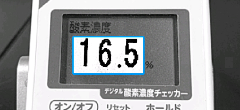
| 認識枠と7seg表示器 | コメント |
|---|---|
OK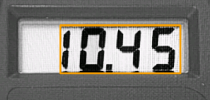 |
良好です。左側の余白部分にも表示される可能性がある場合は,左側に認識枠を広げる必要があります。 |
NG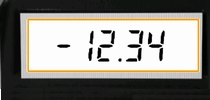 |
正しく認識できません。数字の上部および下部と認識枠の間の隙間が大きすぎ,もう少し近づいてください。 |
NG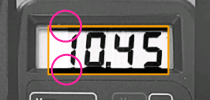 |
正しく認識できません。数字の上部および下部と認識枠の間の隙間が大きすぎ,黒い影が数字につながっています。 |
NG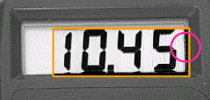 |
正しく認識できません。認識枠の右端に測定器の枠が取り込まれています。10.451のような誤認識になります。 |
NG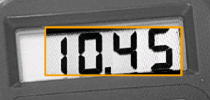 |
正しく認識できません。認識枠に対して,測定器が傾いています。 |
NG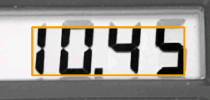 |
正しく認識できません。認識すべき数字が認識枠からはみ出しています。 |
8. 照度不均一の緩和
反射型表示器(自分で発光していない表示器)の場合,画像は周囲の照明の影響を大きく受けます。「採光」の説明にあったような注意が必要です。
軽度な照度の不均一であれば「よむぞう」はそれを緩和する機能を持っています。
メニューから「照度不均一の緩和」を使って,照度不均一を緩和してください。
ただし,緩和量を大きくすることが良いとは限らないので,認識状況を見ながら,うまく動作する設定量を見つけてください。
9. ノイズの緩和
表示器の不具合の影響で,画面内に小さな黒点が現れることがあります。
「よむぞう」は,ぼかしで黒点を緩和する機能を持っています。
メニューから「ノイズの緩和」を使って,黒点を緩和してください。
ただし,ぼかし量を大きくすることが良いわけではないので,認識状況を見ながら,うまく動作する設定量を見つけてください。
10. コーナーカバー
測定器の表示部の左端に,数字・符号以外の表示が現れて,うまく読み取れないことがあります。そのような場合にコーナーカバーを使います。
メニューの「その他の設定」の「左コーナーカバー」を設定します。横幅が異なるカバーが用意されているので,都合の良いほうを使います。
 |
コーナーカバーなし。正しく認識できません。 |
 |
コーナーカバーあり。正しく認識できます。 |
11. 認識前処理の表示
 |
前処理結果表示ボタンにより,認識枠内の前処理結果を白黒二値画像で表示します。この画像が認識エンジンに渡されます。 この画像がきれいに得られていないと正しい認識ができません。 認識枠と文字列が正しく一致していない場合は再度一致させてください。 この画像により「照度不均一の緩和」や「ノイズの緩和」の効果を確かめることもできます。 |
12. 読み上げ
 |
読み上げボタンを押すと読み上げてくれます。読み上げ言語はシステム設定に依存します。 |
13. ファイル保存
13.1 連続データファイル保存
 |
記録保存ボタンを押すと認識結果が一定間隔でCSV形式でファイルに保存されます。 事前にメニューで記録間隔・記録時間を設定しておく必要があります お試し版では保存設定が限定されています。 保存場所はストレージ(エミュレートされている場合でも)のフォルダ「DDReaderWork」です。 |
13.2 単一データファイル保存
|
手持ちのデバイスで対象文字列を認識枠にとらえて,認識・データ保存するのは容易ではありません。 そこで,「よむぞう」は動画から静止画を作り,静止画上で認識枠のと数字文字列の位置合わせ等を行って,認識作業を行います。 次のような手順で行います。 ・静止画ボタンで,動画から静止画を作ります。 ・ズーム,枠幅変更,枠位置変更,画像回転でフレームを文字列に揃えます。 ・読み取りが成功したら,単一データ記録保存ボタンを押します。その時の読み取り値がCSV形式でファイルに保存されます。 保存時には,ダイアログが開き,メモを書き入れることができます。 CSVファイルと同時に認識画像も保存することができます。(ダイアログ内のオプション) ファイル名は「yomzo_recognized.csv」になっており,常に追記されます。 お試し版では保存回数が限定されています。 保存場所はストレージ(エミュレートされている場合でも)のフォルダ「DDReaderWork」です。 メニューからこのファイルを初期化することができます。 |

14. 利用上の注意
- デバイスによってはカメラを長時間使用すると,電池の温度が上昇し,異常停止する場合があります。
- 「よむぞう」の認識率は高いのですが,完全ではありません。「よむぞう」利用によって得られたデータは,ご利用者自身の責任でご利用ください。
15. 補足
15.1 読み上げテスト
 |
読み上げテストボタンを押すと,あらかじめ用意された数値を読み上げます。 読み上げ機構が働いているかどうかのチェックができます。 |
15.2 ファイル保存テスト
 |
ファイル保存テストを押すと,あらかじめ用意されたデータが,CSV形式でファイルに出力されます。 保存場所はストレージ(エミュレートされている場合でも)のフォルダ「DDReaderWork」です。 |
15.3 保存されたCSVファイルをWindowsPCに取り込む
保存されたCSVファイルをWindowsPCに取り込むには次の手順で行ってください。
- USBケーブルでPCとデバイスを接続します。
- デバイスは普通は充電のみ許す設定になっていると思いますので,デバイス側でファイル転送を許す設定にしてください。
- 次にWindowsPCのエクスプローラからみると,デバイスが1つの外部ストレージ(SDカードなどと同じ)として見えるので,開きます。
- フォルダ「DDReaderWork」内に保存時刻に由来したファイル名を持つCSVファイルがあるので,PC側にコピーしてください。
- そのCSVファイルは必要に応じて,表計算ソフトで加工できます。
16. クレジット
「よむぞう」は次の2つのライブラリを用いています。
- OpenCV (BSD License)
- Tesseract OCR (Apache License 2.0)