M5StackGrayで2つのレーザー距離センサの同時接続テスト2
2021.7.15 Coskx Lab
1 はじめに
M5StackGrayで2つのレーザー距離センサの同時接続テストにてM5Stack Grayにレーザー距離センサVL53L1X(STMicroelectronics)を2つ接続して周囲の対象物までの距離を測定しました。
ところが,2つのVL53L1Xを同時に使うのに2本のGPIOピンを占有してしまいました。
ライブラリーに少し手を入れて,GPIOピン1本で2つのVL53L1Xを同時に使えるようにしました。
GPIOピンの枯渇に困ったときにはこの手を使えます。
2 使用環境
- Windows 10 64-bit
- Arduino IDE 1.8.13
- M5Stack Gray ESP32-D0WDQ6-V3 (revision 3)
MPU6886 + BMM150 16MB 40MHz
- AE-VL53L1X 2個
3 接続
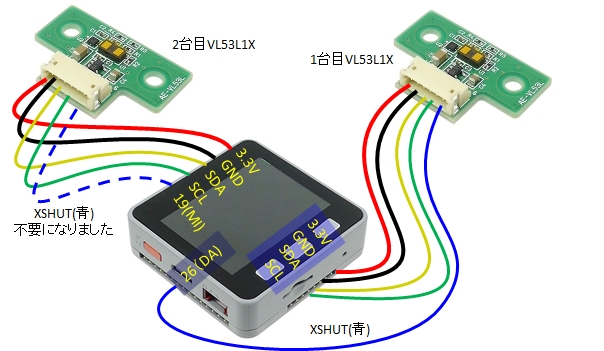
図のように2つのAE-VL53L1XをM5Stackに接続します。2つのAE-VL53L1XのSDAとSCLはそれぞれ同じところに接続します。
XSHUTはあらかじめ決めておいたGPIOに接続します。AE-VL53L1XのGPIOはAE-VL53L1X内部でプルアップされているので何もつながないことにします。
構想段階で2台目センサのXSHUTは使用せず,1台目のセンサのXSHUTはGPIO26につなぐと決めておきます。
今後,配線においてもプログラムにおいても矛盾がないようにします。
注意1 モータなどのノイズ発生機器と同時にレーザ距離センサを使う場合,使用していないXSHUT(青)とGPIO(紫)のケーブルは,コネクタから外してください。ノイズの影響でレーザ距離センサが誤動作する場合があります。
| 名称 | 機能 | 配線色 | M5Stack配線先 |
| V+ | 3.3~5V 入力 | 赤 | 3.3V |
| GND | GND | 黒 | GND |
| SDA | データ線 | 黄 | SDA (21) |
| SCL | クロック線 | 緑 | SCL (22) |
| XSHUT | シャットダウン入力端子 | 青 | 1台目のみM5StackGPIO26ピンへ |
| GPIO | GPIO(2.8Vレベル) | 紫 | 接続しない |
4 準備
VL53L1XはI2CでCPUとデータをやり取りしますが,そのためのライブラリが必要です。
「by PoLolu」のVL53L1Xライブラリを手直しして使います。
VL53L1Xm1.zipをダウンロードして,解凍して中のVL53L1Xm1.cppとVL53L1Xm1.hを.inoと同じ作業フォルダに入れてください。
5 テストプログラム
2つのVL53L1Xを同時に使いますが,defaultでは2つとも同じI2Cアドレス0x29を持っています。
アドレスの競合を避けるために,2台目センサのアドレスを0x2bに変更します。
VL53L1XにはXSHUTという端子があり,これをLにするとそのVL53L1Xは無効になります。
この仕組みを利用して1台目センサを無効にしておいて,そのすきに2台目センサと通信してI2Cアドレスを変更します。
ここで,VL53L1XのXSHUTは2.8V信号で,2.8Vでプルアップされているため,XSHUTラインのGPIO26はOpenDrain設定にしておく必要があります。
2台目センサは無効にする必要がないのですが,作業が終わってM5Stackがリセットされても,2台目センサへの電源供給は止まらないので,2台目センサは変更されたI2Cアドレスを持ち続けています。
プログラムが再起動したときに,すでに2台目のアドレスが変更されている場合は,それを壊さないように再初期化します。その時に,ライブラリに追加した次の2つの関数を使用します。
justsetAddress()
reinit()
動作確認用プログラム本体
//DistanceSenSor_DualVL53l1xTrial0.ino//
#include <M5Stack.h>
#include <Wire.h>
#include "VL53L1Xm1.h"
//https://www.arduino.cc/reference/en/libraries/vl53l1x/
//https://klab.hateblo.jp/entry/2021/04/18/094705
//2つのVL53L1Xを同時に使いますが,defaultでは2つとも同じI2Cアドレス0x29を持っています。
//アドレスの競合を避けるために,2台目センサのアドレスを0x2bに変更します。
//VL53L1XにはXSHUTという端子があり,これをLにするとそのVL53L1Xは無効になります。
//この仕組みを利用して1台目センサを無効にしておいて,そのすきに2台目センサと通信してI2Cアドレスを変更します。
//GPIO26を1台目センサのXSHUTに接続しておきます。
//
//1台目センサのXSHUTをLにすると,defaultアドレスで有効なのは2台目センサだけになります
//この状況で2台目センサのアドレス変更作業を行います。
//作業が終わったら,1台目センサのXSHUTおHに戻して1台目センサを復活させます。
//ここで,VL53L1XのXSHUTは2.8V信号で,2.8Vでプルアップされているため,XSHUTがつながっているGPIO26はOpenDrain設定にしておく必要があります。
//
//M5Stackがresetボタンでリセットされたとき,更新プログラムが書き込まれたとき,VL53L1Xはリセットされないので,I2Cアドレスは書き換わったままになります。
//その場合は,init()の代わりに
//justsetAddress()
//reinit()
//を行います
//SingleMode (not ContinuousMode)
//必要なときに1回だけ測距
VL53L1X sensor1;
VL53L1X sensor2;
int measurementstatus1 = 0; //0:何もしていない 1:リクエスト中
int measurementstatus2 = 0; //0:何もしていない 1:リクエスト中
const int SDApin = 21; //SDAピン番号
const int SCLpin = 22; //SCLピン番号
const int XSHUTofSensor1pin = 26; //1台目センサのXSHUTのピン番号
const uint8_t Sensor2I2Caddress = 0x2b; //変更後の2台目センサのI2Cアドレス
void setup()
{
M5.begin();
M5.Power.begin();
M5.Lcd.setTextSize(2); //高さ16 26文字/行
pinMode(XSHUTofSensor1pin, OUTPUT_OPEN_DRAIN);//オープンドレイン設定
digitalWrite(XSHUTofSensor1pin, LOW); //1台目センサを無効状態にする
delay(100); //無効状態=初期化を確実にする
Wire.begin(SDApin,SCLpin); //ここをGray用に設定しないと通信に失敗する
Wire.setClock(400000); // use 400 kHz I2C
//I2Cアドレス使用状況の検証
/*
M5.Lcd.setCursor(0, 110);
int address, error;
for (address = 1; address<255; address++) {
Wire.beginTransmission(address);
error = Wire.endTransmission();
if(error==0){
M5.Lcd.print(address,HEX);M5.Lcd.print(" ");
}
delay(10);
// 10 68 75 90 E8 F5
}
*/
Wire.beginTransmission(Sensor2I2Caddress);
if (Wire.endTransmission()==0) { //2台目センサが前回設定のアドレスを覚えていたとき
sensor2.setTimeout(500); //[msec]
sensor2.justsetAddress(Sensor2I2Caddress);
if (!sensor2.reinit())
{
M5.Lcd.println("Failed to detect and reinitialize sensor2!");
while (1);
}
} else {
sensor2.setTimeout(500); //[msec]
if (!sensor2.init())
{
M5.Lcd.println("Failed to detect and initialize sensor2!");
if (sensor2.timeoutOccurred()) M5.Lcd.println("Time out");
while (1);
}
sensor2.setAddress((uint8_t)Sensor2I2Caddress); //2台目センサーのアドレス変更
}
digitalWrite(XSHUTofSensor1pin, HIGH); //1台目センサを有効状態に戻す
//delay(100);
if (!sensor1.init())
{
M5.Lcd.println("Failed to detect and initialize sensor1!");
while (1);
}
//I2Cアドレス使用状況の検証
/*
M5.Lcd.println();
for (address = 1; address<255; address++) {
Wire.beginTransmission(address);
error = Wire.endTransmission();
if(error==0){
M5.Lcd.print(address,HEX);M5.Lcd.print(" ");
}
delay(10);
// 10 29 2B 68 75 90 A9 AB E8 F5
// 29 2B が増える 同時にA9 ABも増える
// 2台目のアドレスを2Dに設定すると 29 2DとA9 ADが増える
}
*/
sensor1.setDistanceMode(VL53L1X::Long);
sensor2.setDistanceMode(VL53L1X::Long);
sensor1.setMeasurementTimingBudget(50000); //測定タイミングバジェット(1回の距離測定)に許容される時間[micros]
sensor2.setMeasurementTimingBudget(50000); //測定タイミングバジェット(1回の距離測定)に許容される時間[micros]
M5.Lcd.setCursor(0, 0);
M5.Lcd.println("Dual VL53L1X Started");
}
void loop()
{
if (measurementstatus1 == 0) {
sensor1.readSingle(false); //start the measurement
measurementstatus1 = 1;
} else if (sensor1.timeoutOccurred()) {
M5.Lcd.setCursor(0, 30);
M5.Lcd.print("Sensor1 TIMEOUT ");
measurementstatus1 = 0;
} else if (measurementstatus1 == 1) {
if (sensor1.dataReady()){ //センサデータ取得完了だったら
measurementstatus1 = 0;
int result = 0;
result = sensor1.read(false);
M5.Lcd.setCursor(0, 30);
M5.Lcd.print(" ");
M5.Lcd.setCursor(0, 30);
M5.Lcd.printf("status: %s\n",VL53L1X::rangeStatusToString(sensor1.ranging_data.range_status));
M5.Lcd.printf("S2 result[mm]:%5d \n",result);
}
}
if (measurementstatus2 == 0) {
sensor2.readSingle(false); //start the measurement
measurementstatus2 = 1;
} else if (sensor1.timeoutOccurred()) {
M5.Lcd.setCursor(0, 70);
M5.Lcd.print("Sensor2 TIMEOUT ");
measurementstatus2 = 0;
} else if (measurementstatus2 == 1) {
if (sensor2.dataReady()){ //センサデータ取得完了だったら
measurementstatus2 = 0;
int result = 0;
result = sensor2.read(false);
M5.Lcd.setCursor(0, 70);
M5.Lcd.print(" ");
M5.Lcd.setCursor(0, 70);
M5.Lcd.printf("status: %s\n",VL53L1X::rangeStatusToString(sensor2.ranging_data.range_status));
M5.Lcd.printf("S1 result[mm]:%5d \n",result);
}
}
}
6 トラブルシューティング
動作が不安定,時折初期化を失敗するとき,モータを含むシステムで使って誤動作するとき
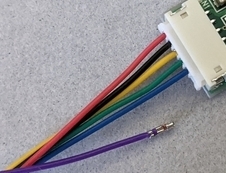
(1)センサケーブルが細くて耐ノイズ性に問題があります。ケーブルはきれいに束ねない方がよいようです。
(2)使用していないセンサのケーブル(例えばGPIOの紫ケーブル)はノイズの原因になりますので取り外した方が良いでしょう。(下の画像は紫ケーブルを外したところ。細いピンなどで詰めを持ち上げれば簡単に外れます。)
(3)XSHUTを使っている場合,センサ内部でプルアップされているので,マイコン側はオープンドレインに設定するのがセオリですが,ノイズに弱くなるので,単なる出力設定にすると改善されることがあります。
pinMode(〇〇〇〇, OUTPUT_OPEN_DRAIN);
ではなく
pinMode(〇〇〇〇, OUTPUT);
7 まとめ
2つのレーザ距離センサVL53L1Xが同時に動作していることを確認できました。
最初に一回使うだけのGPIOピンを1本のみ占有になりました。
自由に使えるGPIOピンは少ないので,このライブラリの修正は使えると思います。