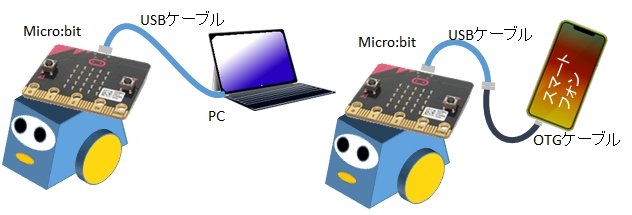
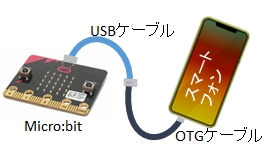
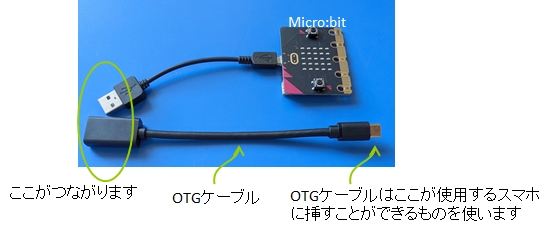
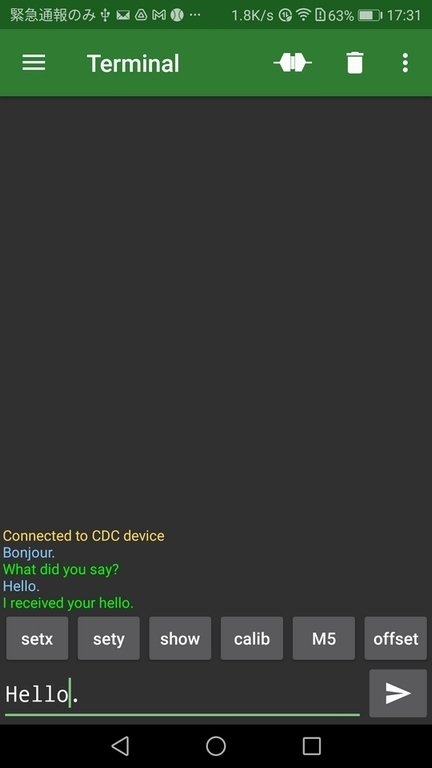
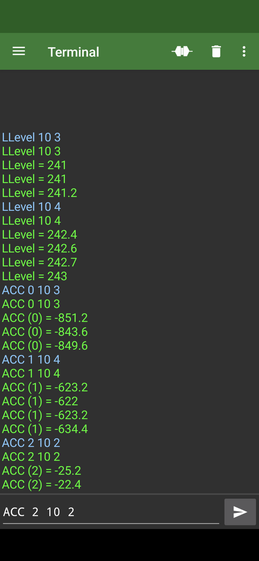
(2) とAndroidスマートフォンでアプリ「Serial USB Terminal」を起動します。
「Serial USB Terminal」が起動したら,左上3本線メニューから「Device」を選び,BBC micro:bitが見つかるので,選びます。
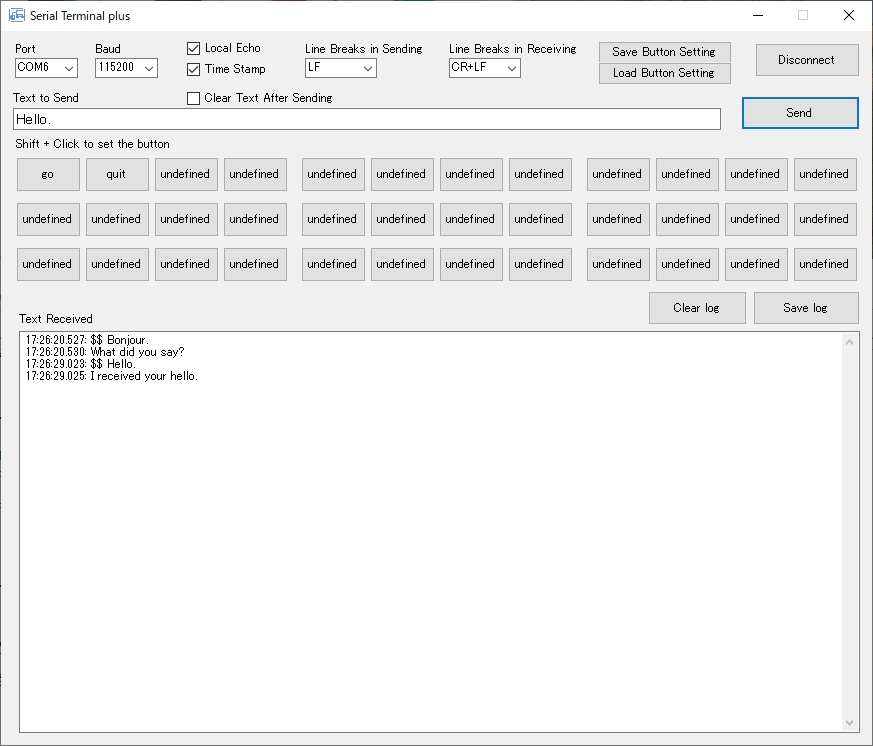
左上3本線メニューから「Setting」を選び,「Serial」で
Baud rate 115200
にします。
「Setting」の「Terminal」で
Buffer size 大きめに設定(200kB)
「Setting」の「Receive」で
Newline CR+LF
「Setting」の「Send」で
Newline LF
Local echo 有効
とします。
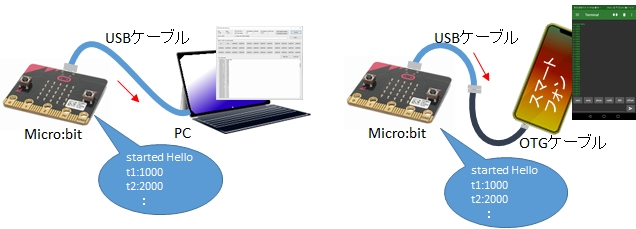
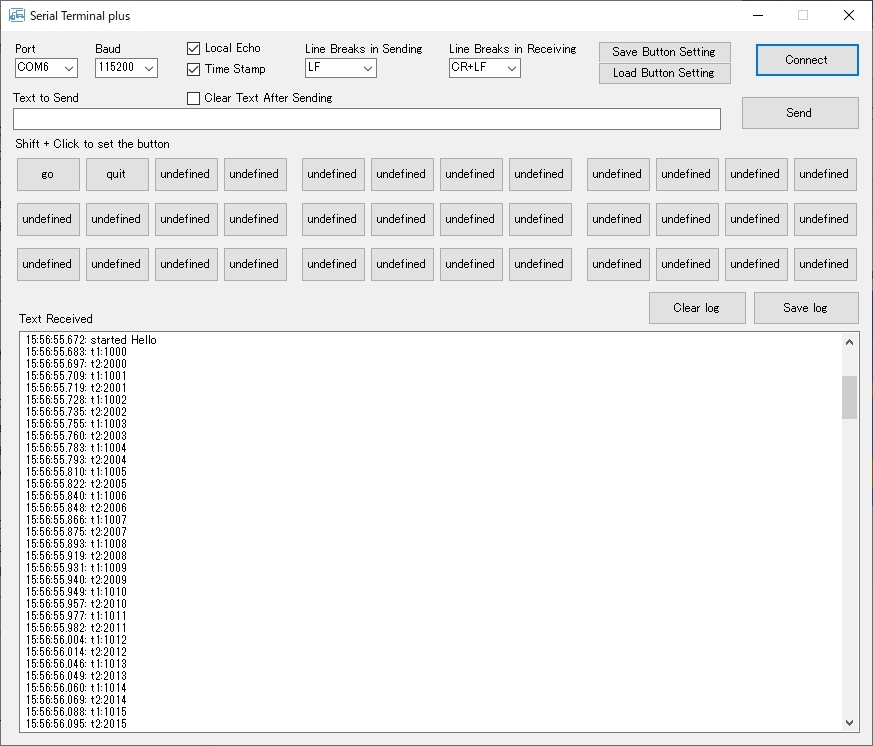
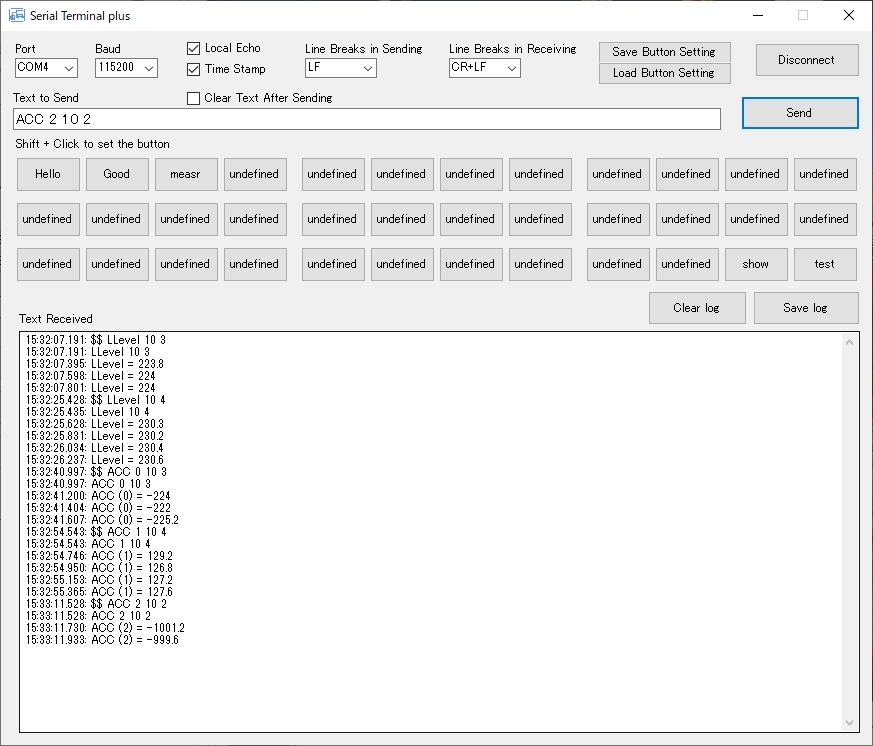
ボタンConnect(上部,ゴミ箱の隣)をクリックすると,すでにmicro:bitは動作中のため,表示が次のように現れるはずです。
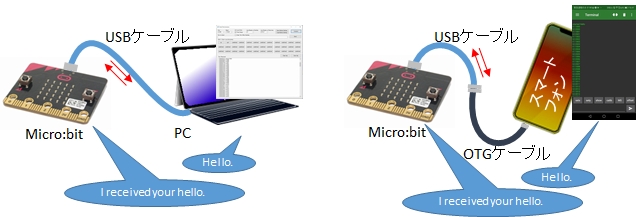
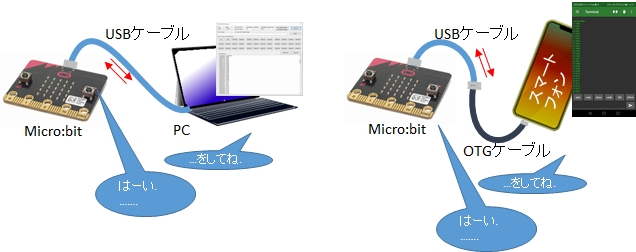
5 micro:bitとシリアルターミナルアプリの双方向シリアル通信
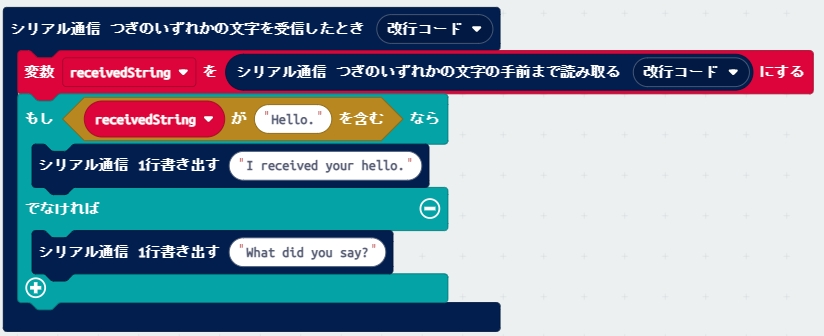
シリアルターミナルアプリから,「Hello.」や他の文字列をmicro:bitに送り,micro:bitは「Hello.」の文字列を受け取ったら「I received your hello.」とシリアルターミナルアプリに返し,違うものを受け取ったら「What did you say?」をシリアルターミナルアプリに返すテストプログラムを作ります。
コピペする場合は,次のソースコードをJavaScriptソースとして貼り付ければ完了です。
let receivedString = ""
serial.onDataReceived(serial.delimiters(Delimiters.NewLine), function () {
receivedString = serial.readUntil(serial.delimiters(Delimiters.NewLine))
if (receivedString.includes("Hello.")) {
serial.writeLine("I received your hello.")
} else {
serial.writeLine("What did you say?")
}
})
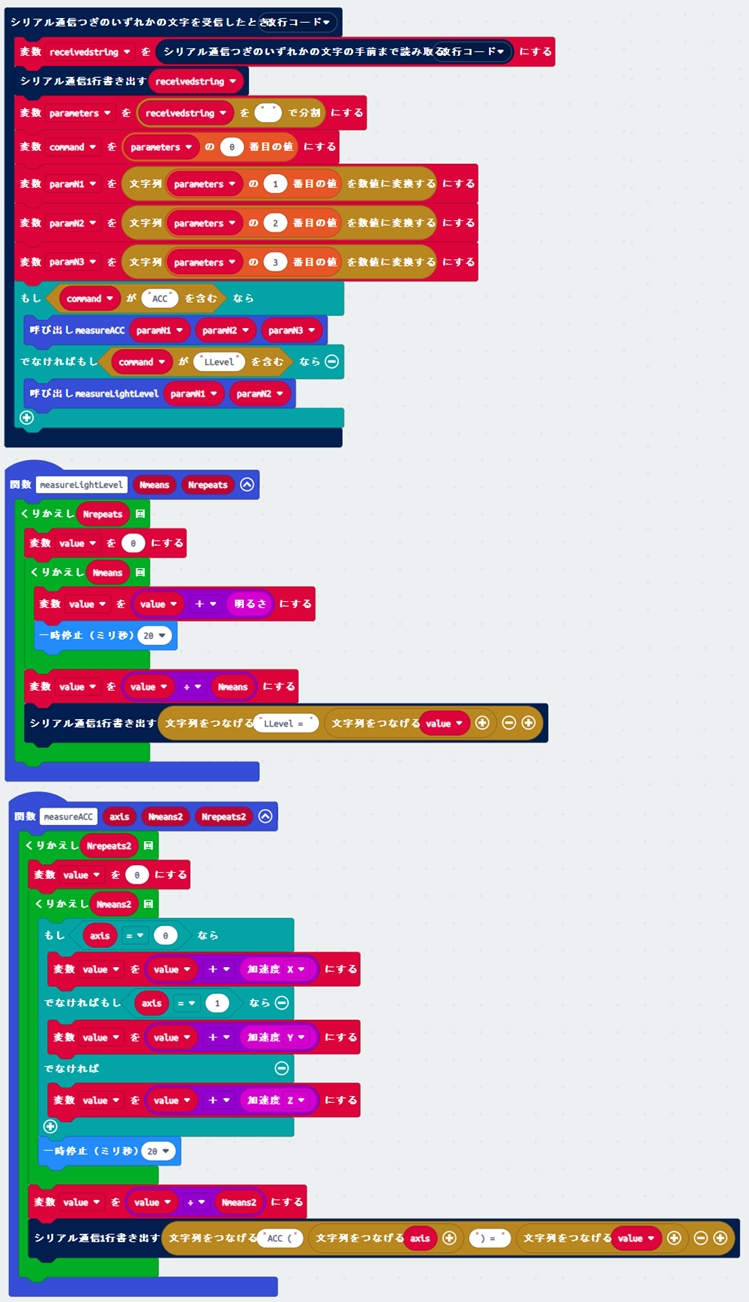
let receivedstring = ""
let parameters: string[] = []
let command = ""
let paramN1 = 0
let paramN2 = 0
let paramN3 = 0
let value = 0
serial.onDataReceived(serial.delimiters(Delimiters.NewLine), function () {
receivedstring = serial.readUntil(serial.delimiters(Delimiters.NewLine))
serial.writeLine(receivedstring)
parameters = receivedstring.split(" ")
command = parameters[0]
paramN1 = parseFloat(parameters[1])
paramN2 = parseFloat(parameters[2])
paramN3 = parseFloat(parameters[3])
if (command.includes("ACC")) {
measureACC(paramN1, paramN2, paramN3)
} else if (command.includes("LLevel")) {
measureLightLevel(paramN1, paramN2)
}
})
function measureLightLevel (Nmeans: number, Nrepeats: number) {
for (let index = 0; index < Nrepeats; index++) {
value = 0
for (let index = 0; index < Nmeans; index++) {
value = value + input.lightLevel()
basic.pause(20)
}
value = value / Nmeans
serial.writeLine("LLevel = " + ("" + value))
}
}
function measureACC (axis: number, Nmeans2: number, Nrepeats2: number) {
for (let index = 0; index < Nrepeats2; index++) {
value = 0
for (let index = 0; index < Nmeans2; index++) {
if (axis == 0) {
value = value + input.acceleration(Dimension.X)
} else if (axis == 1) {
value = value + input.acceleration(Dimension.Y)
} else {
value = value + input.acceleration(Dimension.Z)
}
basic.pause(20)
}
value = value / Nmeans2
serial.writeLine("ACC (" + ("" + axis) + ") = " + ("" + value))
}
}
追加説明 ここでは下部のボタンを表示せずに利用していますが,「Serial USB Terminal」では,メニュー→settings→Misc.→Macro buttonsで複数行のボタンを表示しておき,ボタンを長押しすると,ボタンに表示される文字列と,送信されるべき文字列を登録することができるので,作業中はこのボタンを利用すると簡単に操作ができます。